Web 端使用教程
首次使用

首次使用需要先使用配置的 12.6V 2A 充电器插入至机器人的电源接口中,打开电源开关后机器人会进行初始化,OLED 屏幕会显示初始化的一系列内容。
-
机器人开机后 OLED 屏幕上显示内容含义如下:
- 第一行内容表示此时 WiFi 处于 AP 模式下,机器人创建了一个热点,WiFi 热点名为 HexArth;
- 第二行表示 STA 模式处于关闭状态,当 WiFi 处于 STA 模式时,路由器会给机器人分配一个 IP 地址并显示出来;
- 第三行的内容为本设备的MAC地址,该地址是唯一的,用于ESP-NOW通信;
- 第四行 U 表示机器人产品的电源电压。
-
开机后使用手机或电脑连接机器人的 WiFi:HexArth,密码是 12345678,连接 WiFi 后打开谷歌浏览器,在网址栏中输入 192.168.4.1 打开 Web 端使用界面。
Web 端使用教程
Control Panel
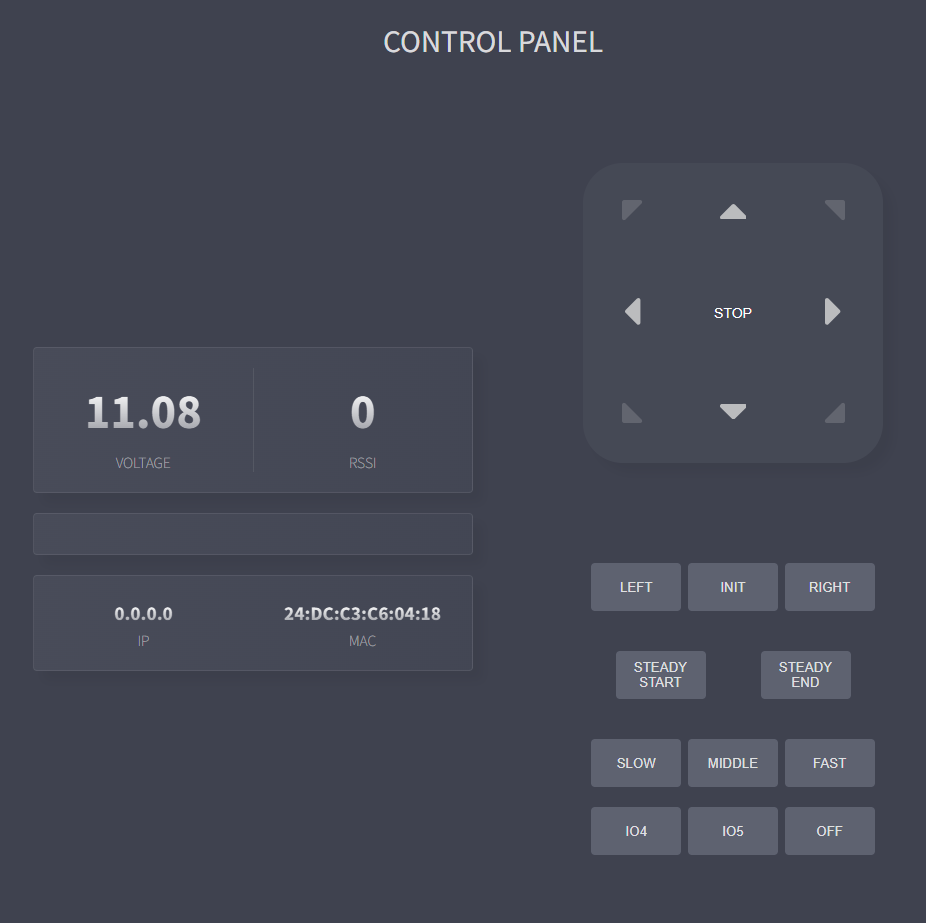
- 这个 Web 端界面会实时显示机器人的电压(VOLTAGE)、STA 模式下的 WIFI 信号强度(RSSI)、IP 和 MAC 地址等信息。
- 通过方向按键可以控制机器人运动,方向按键下面的LEFT、RIGHT 用来控制机器人原地旋转的,INIT用于机器人初始化,STEADY START/END用于打开/关闭机器人的自平衡模式(打开自平衡模式后机器人的运动控制按键会被屏蔽),下面的 SLOW、MIDDLE、FAST 按键用来设置机器人的移动速度。
- 其它按键当机器人外接了其它扩展模块后起作用,IO4、IO5 和 OFF 控制 LED 灯的开关。
Feedback Infomation

- 在 FEEDBACK INFOMATION 这个窗口可以给机器人发送 JSON 指令,输入框以下部分就是具体的 JSON 指令。
- 网页端包含了“心跳检测”,打开网页端控制界面后,Web 端应用会与机器人进行连续通信,如果在机器人的运动过程中断开连接,机器人在短时间内会自动停止运动,避免危险。
- 此 Web 端应用是完全开源的,你可以通过更改开源例程里的 Claws_web_page.h 来更改 Web 端应用的界面和功能。