RoArm-M2
RoArm-M2 是一款面向教育、科研与轻量化自动化开发的四自由度智能机械臂。产品采用总线舵机驱动,主控模组为 ESP32 MCU,支持多种控制方式,提供了灵活的控制接口与丰富的通讯协议,适用于桌面级实验验证、移动机器人平台集成及教学实验场景。
该机械臂在结构设计上采用创新双驱技术使肩关节的力矩成倍增加,提升机械臂整体负载能力的同时也提高了结构可靠性。用户无需复杂部署即可完成基础操作,同时也可基于开放接口进行深度开发。
核心特点:
- 轻量化结构:采用了碳纤维和 5052 铝合金,机身的轻便性便于其灵活安装在各种移动平台。
- 全向工作空间:360° 全方位旋转的底座搭配灵活的关节运动,创造直径达 1 m 的工作空间,实现全方位运动自如。
- 多平台兼容:兼容 ROS2 和多种上位机,支持多种无线和有线通信方式,为不同的开发和控制需求提供了灵活性。
- 开源代码:开源全部控制代码和通信接口文档,方便用户进行二次开发。
- 丰富教程资源:提供丰富的图文教程,涵盖多种功能,帮助用户快速上手学习和使用机械臂。
如果您需要一个兼具灵活性、可扩展性和易用性的解决方案,RoArm-M2 将会是很好的选择,助您实现更多创新。
版本区别说明
| 型号 | 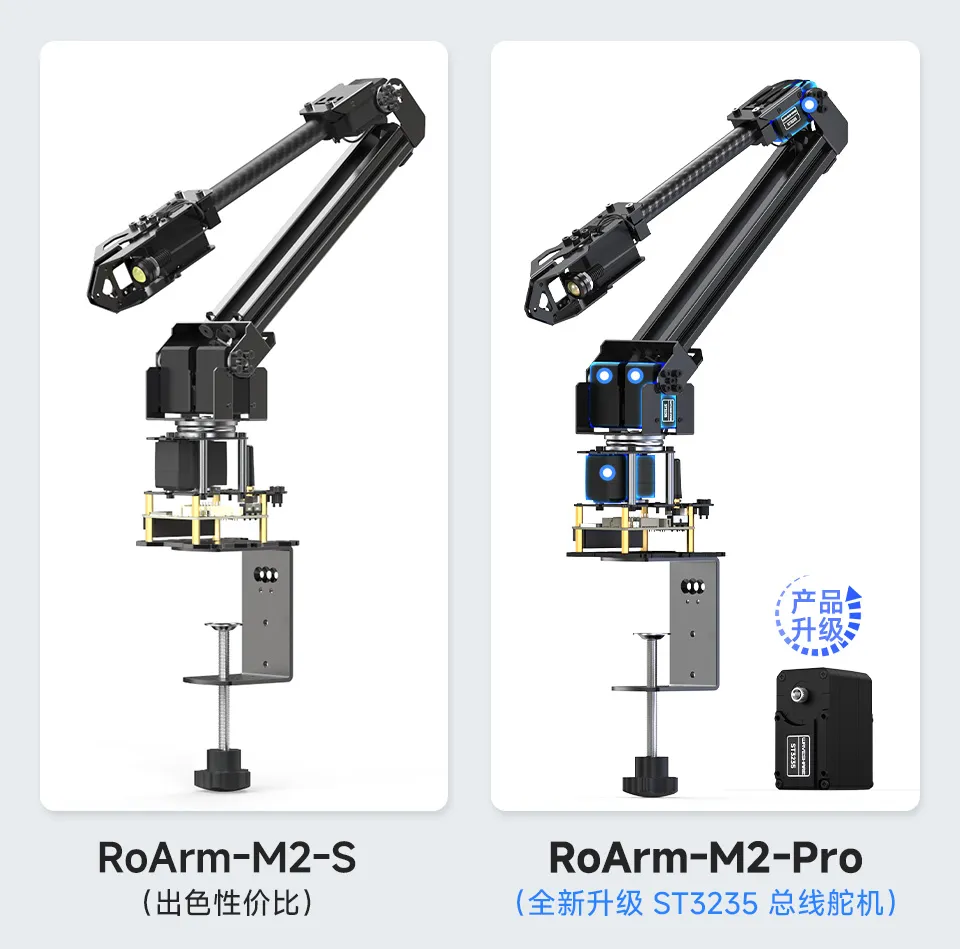 | |
|---|---|---|
| 舵机 | ST3215 ×5 | ST3235 ×4 ST3215-HS ×1(夹爪舵机) |
| 舵机材质 | 均为塑料外壳 | ST3235 为金属外壳 ST3215-HS 为塑料外壳 |
| 结构强度 | 标准 | 更高结构刚性 |
| 适用场景 | 教学/轻量实验 | 更高频率使用/长期运行 |
备注
两个版本在核心性能参数上保持一致,主要区别在于舵机结构材质。Pro 版本在主体舵机上采用金属外壳结构,机身更坚固,提升产品的稳定性和耐久性。
产品参数
| 型号 | RoArm-M2-S | RoArm-M2-Pro | |
|---|---|---|---|
| 机械性能参数 | 自由度 | 4 | |
| 负载 | 0.5 kg@0.5 m | ||
| 重量(不含桌边固定夹) | 826±15 g | 873.3±15 g | |
| 工作直径 | 水平直径:1090 mm(Max,360° 全向) 垂直范围:798 mm(Max) | ||
| 底座活动范围 | 360° | ||
| 重复定位精度 | ≈±4 mm(相同负载) | ||
| 桌边固定夹重量 | 290±10 g | ||
| 桌边固定夹可夹厚度 | <72 mm | ||
| LED 补光灯功率 | <1.5 W | ||
| 电气参数 | 工作电压范围 | 7~12.6 V | |
| 推荐电源规格 | 标配 12V 5A 电源,可使用 3S 锂电池组供电 | ||
| 电源接口类型 | DC5521 | ||
| 控制系统参数 | 板载主控 | ESP32-WROOM-32 | |
| 板载主控模组特性 | WiFi、BT、Dual Core、240MHz | ||
| 通信方式 | WiFi/ESP-NOW/UART/USB | ||
| 无线控制方式 | 2.4G-WiFi/ESP-NOW | ||
| 有线控制方式 | USB/UART | ||
| 支持的上位机 | 树莓派/Jetson Orin Nano/PC 等支持串口的设备 | ||
产品尺寸
单位:mm
夹爪形态尺寸
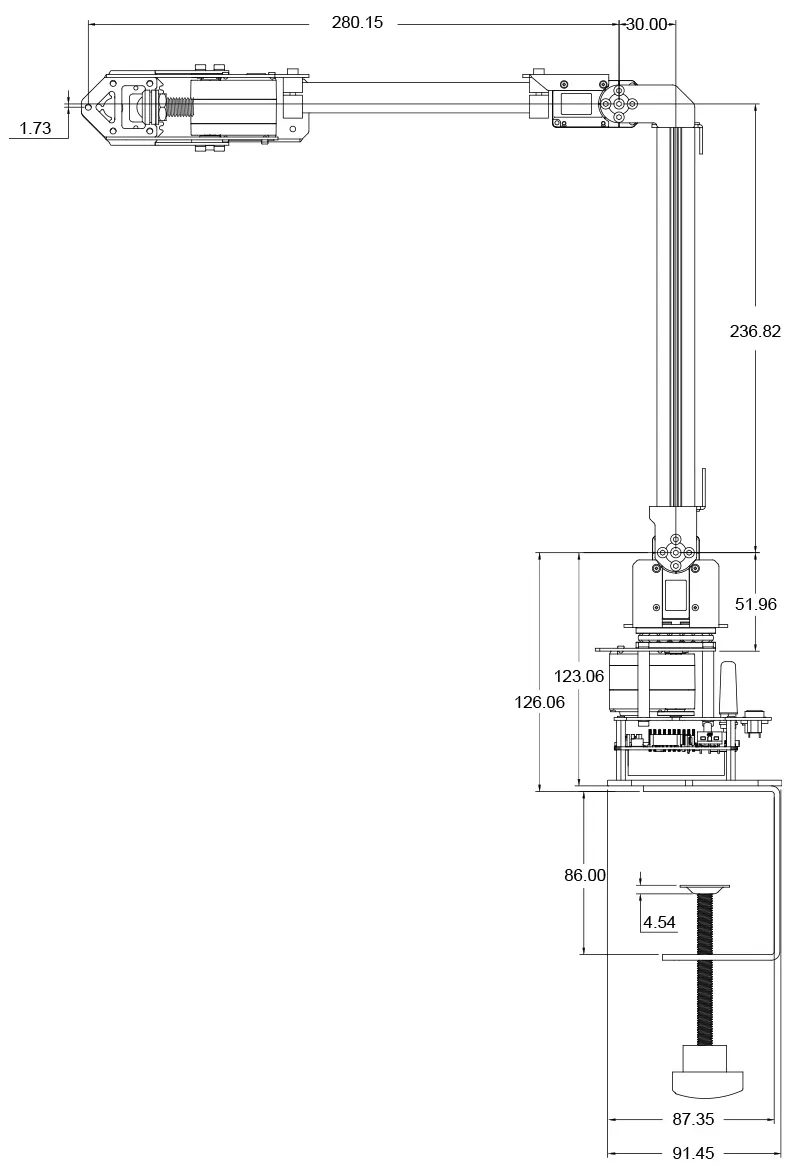
手腕形态尺寸
