RoArm-M2 入门使用教程
1. 开箱清单
RoArm-M2-S 与 Pro 版本配件一致,请对照下方清单逐一确认配件是否齐全且无损。如有缺失或损坏,请勿上电,及时联系技术支持。
| 序号 | 名称 | 数量 | 图片 | 用途说明 |
|---|---|---|---|---|
| 1 | RoArm-M2-S/Pro 机械臂主体 | 1 |  | 机械臂本体 |
| 2 | 12 V 5 A 电源适配器 | 1 |  | 为机械臂提供 12 V 5 A 工作电源,请务必使用官方配套适配器 |
| 3 | 可拆电源转换头 | 1 |  | 适配不同国家/地区的墙壁插座规格,可按需更换插脚 |
| 4 | Jetson Nano Adapter (C) | 1 |  | 板载电平拉高 IC,用于机械臂与上位机(树莓派 / Jetson Orin Nano / RDK 等)之间的 UART 串口通信连接,可改善部分上位机 UART 串口驱动能力不足导致的通信不稳定问题 |
| 5 | USB 线(Type A 公转 Type C 公) | 1 |  | 用于机械臂与上位机(PC/树莓派等)之间的 USB 串口通信连接 |
| 6 | 双排杜邦线(2*5PIN,2.54 间距,9 cm,同向) | 1 |  | 用于机械臂与上位机之间的 UART 串口有线通信扩展接线 |
| 7 | 导轨扩展底座 | 1 |  | 带 T 型槽导轨的扩展板,可安装在机械臂大臂上进行外部设备的扩展安装 |
| 8 | 轻量化底座 | 1 |  | 轻量化固定底板,适用于对重量有要求的移动平台安装场景 |
| 9 | 摄像头支架 | 1 |  | 用于在机械臂末端或机身上固定摄像头,支持视觉识别等应用(因下位机驱动板上无摄像头接口,视觉应用需扩展上位机实现) |
| 10 | 末端扩展支架 | 1 |  | 安装在机械臂末端,用于挂载自定义末端执行器(如吸盘、传感器等) |
| 11 | 5264 舵机连接线(3PIN,900 mm,异向) | 1 |  | 备用舵机总线连接线,用于末端执行器扩展或舵机替换时的接线 |
| 12 | 小十字套筒 | 1 |  | 可用于拧紧六角铜柱 |
| 13 | 黑色橡皮筋(直径 30 mm,宽 5 mm) | 8 |  | 可利用橡皮筋收缩的弹力来补偿重力影响,增加机械臂的有效载荷 |
| 14 | 两用内六角螺丝刀 | 1 |  | 用于拆装机身螺丝,支持两种规格内六角,满足不同部位的拆装需求 |
| 15 | RoArm-M2【螺丝包】:
| 1 |  | 用于安装底座、挂载扩展支架及固定各类外设配件时的螺丝备件 |
2. 机械预检
在给机械臂连接电源之前,请按以下顺序逐项检查设备状态:
-
运输损失检查:
- 检查外壳与各关节部件是否存在因运输造成的变形、破损或裂纹。
✅ 通过标准:外观完整,无明显变形或缺损。
- 检查外壳与各关节部件是否存在因运输造成的变形、破损或裂纹。
-
螺丝紧固检查
- 检查整机螺丝是否紧固,重点检查各关节连接部位。
✅ 通过标准:所有螺丝无松动,关节连接稳固。
- 检查整机螺丝是否紧固,重点检查各关节连接部位。
-
线缆检查
- 检查各关节之间的线缆端子固定是否牢固;
- 检查所有外露线缆是否完整,有无因包装挤压造成的破损或折断。
✅ 通过标准:各关节之间线缆连接牢固,所有线缆外皮完好,无破损、裸露或异常折痕。
-
关节活动检查:
- 取出机械臂,转动各关节是否活动正常。
✅ 通过标准:机械臂各关节可自由活动,无卡顿或阻滞感。
- 取出机械臂,转动各关节是否活动正常。
以上任意一项检查未通过,请勿上电,联系技术支持处理后再继续使用。
3. 外观与接口说明
下面展示了设备的外观与各个接口的布局。
3.1 外观图示
 机械臂外观部位标注图
机械臂外观部位标注图
3.2 底座接口与功能说明
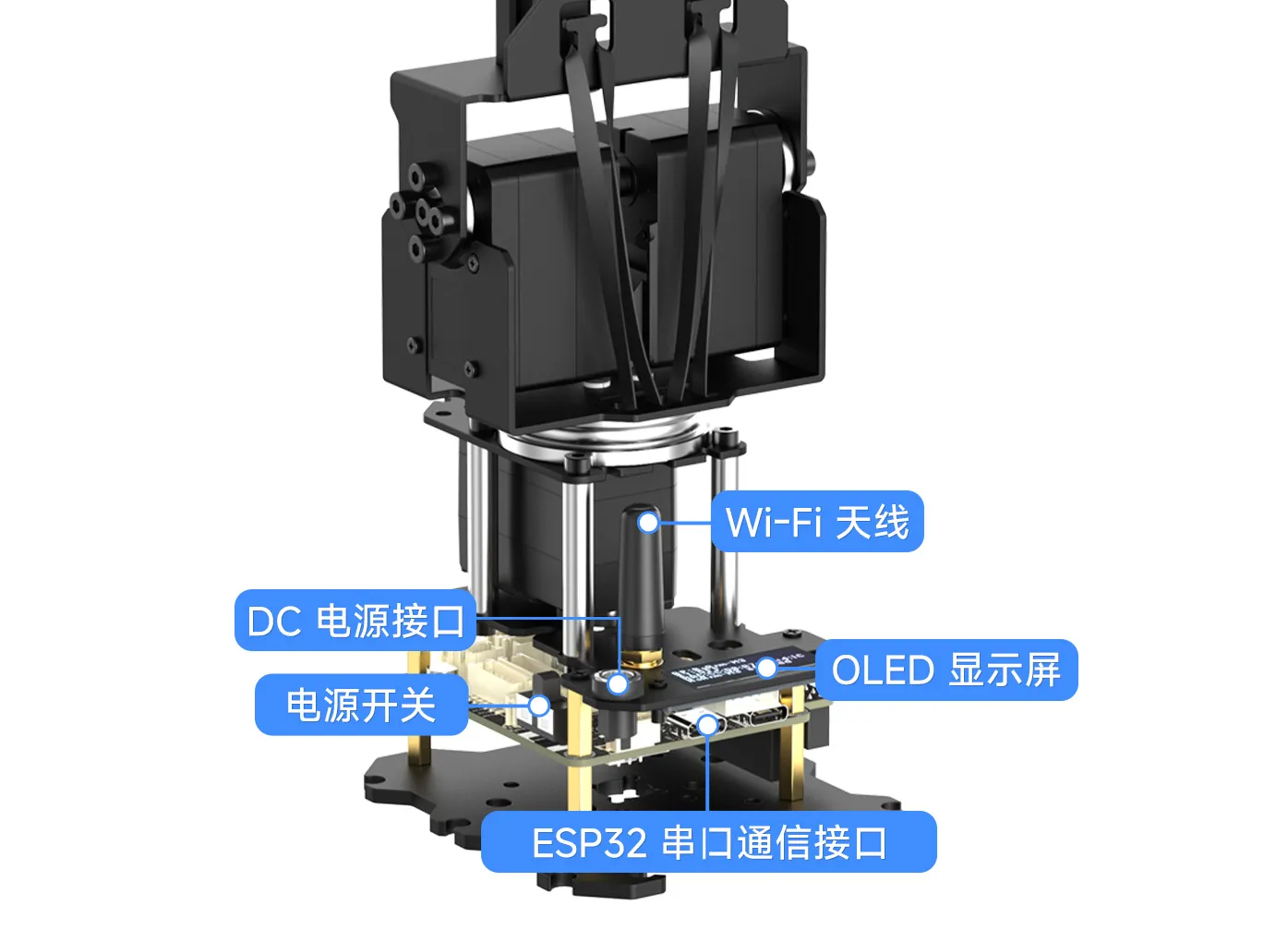 机械臂底座接口标注图
机械臂底座接口标注图
| 名称 | 说明 |
|---|---|
| WiFi 天线 | 连接至底座内部 ESP32 模块,用于 Wi-Fi 无线通信 |
| OLED 显示屏 | 实时显示当前网络模式(AP/STA)、MAC 地址、电压等状态信息,详见 OLED 显示屏状态说明 |
| DC 电源接口 | DC 电源输入接口,请使用微雪官方提供的 12 V 5 A 电源适配器 |
| 电源开关 | 控制整机供电的开关,拨至 ON 为通电,拨至 OFF 为断电 |
| ESP32 串口通信接口 | 用于固件烧录,以及与上位机(树莓派 / Jetson 等)进行有线串口通信 |
4. 上电与连接
上电前请确认:
- 底座已可靠固定,机械臂周围无遮挡物;
- 首次使用时,请勿挂载重物或执行复杂任务,确保设备运行平稳。
步骤一 连接电源
确认电源开关处于 OFF(关)状态后,将官方电源适配器插入底座的 DC 电源接口并接通电源插座,再将电源开关拨至 ON(开)。
正常通电后驱动板指示灯会亮红灯,但指示灯亮并不代表机械臂已通过电源适配器供电——仅插入 USB 线时指示灯同样会亮。
判断机械臂是否正常供电,请查看 OLED 显示屏第四行的电压值:
- 显示约为 12 V → 机械臂已通过电源适配器正常供电 ✅
- 显示约为 0 V → 机械臂未接通电源适配器或电源开关未打开 ❌
步骤二 设备初始化
上电后设备将自动进行初始化,初始化过程中机械臂各关节会自动运动至初始位置,请确保机械臂运动范围内无遮挡物。
出厂默认的初始位置为各关节的中位(如下图所示)。
 机械臂各关节中位示意图
机械臂各关节中位示意图
用户可通过[自定义初始位置教程]修改初始位置;修改后,每次上电初始化时机械臂将运动至用户设定的初始位置,而非中位。
步骤三 确认 OLED 显示屏状态
初始化完成后,底座 OLED 屏幕将显示以下内容:

上述显示内容含义如下:
| 行数 | 显示字段 | 含义 |
|---|---|---|
| 1 | AP:RoArm-M2 | 当前 WiFi 处于 AP 模式下,WiFi 热点名为 RoArm-M2 |
| 2 | ST:OFF | STA 模式处于关闭状态;若已连接至路由器,此处将显示路由器分配的 IP 地址 |
| 3 | (例)MAC:DB:13:2A:30:1F:58 | 该设备的唯一 MAC 地址,用于 ESP-NOW 多机通信时识别设备 |
| 4 | RoArm-M2 V:12.12 | 机械臂为 RoArm-M2 系列以及当前实时电压值,可用于判断供电状态 |
步骤四 连接 WiFi
在手机或电脑的 WiFi 列表中找到以下热点并连接:
-
热点名称:
RoArm-M2 -
密码:
12345678
步骤五 打开 Web 控制界面
推荐使用 Google Chrome 浏览器访问控制界面,以获得最佳兼容性与显示效果。如尚未安装,可点击此处前往下载。
连接 WiFi 后,打开浏览器,在网址栏中输入 192.168.4.1 并回车,看到下图界面即表示连接成功。
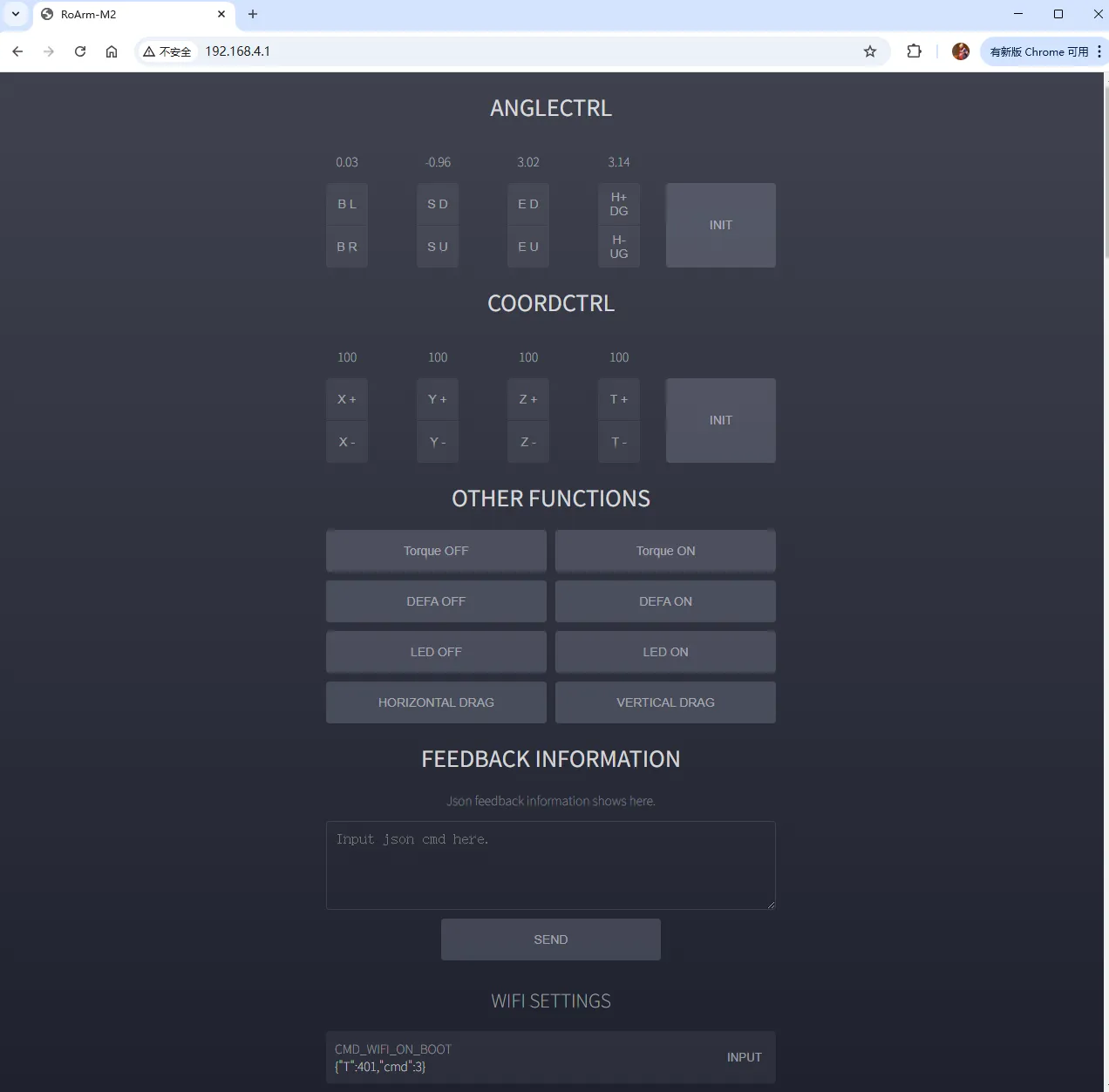 Web 控制界面图
Web 控制界面图
请前往相关资料页面,下载离线版 Google Chrome 安装包后在本地打开安装使用。
完成以上步骤后,请前往Web 端控制界面了解各功能模块的使用方法,快速上手使用机械臂。