Web 控制界面使用
本节将逐一详细介绍 Web 控制界面中每个功能模块的使用方法。
在开始学习之前,请先完成准备工作 → 上电与连接中的步骤,确认已打开 Web 控制界面。
Web 控制界面从上到下共分为以下功能模块:
| 模块 | 图片 | 功能概述 |
|---|---|---|
| ANGLECTRL |  | 通过按钮控制各关节的转动角度 |
| COORDCTRL |  | 通过按钮控制机械臂末端点的空间坐标位置;使用前建议先阅读坐标系说明,了解各轴方向定义 |
| OTHER FUNCTIONS |  | 其它功能按钮,如扭矩锁、LED 灯开关等,具体见下方 |
| FEEDBACK INFORMATION |  | 可手动发送 JSON 指令,且可显示对应指令反馈的机械臂信息 |
1. ANGLECTRL
ANGLECTRL 模块用于直接控制机械臂各关节的转动角度,是最基础的控制方式。
界面中各关节的角度以弧度显示,而非日常使用的「度」。两者的换算关系如下:
| 弧度值 | 对应角度 |
|---|---|
| 0 | 0° |
| 1.57 | 90° |
| 3.14 | 180° |
| -1.57 | -90° |
| -3.14 | -180° |
初次使用时作参考即可,看按钮上数字的变化方向即可判断关节转动情况。
1.1 关节按钮说明
 角度控制按钮标注图
角度控制按钮标注图
每列按钮上方显示的数字,是该关节当前所处的角度(弧度制)。
- 需持续按住按钮,关节才会持续运动,松开按钮后关节立即停止运动;
- 按钮上方数字仅在按键松开后才会刷新,松手后数字更新至当前位置;
- 当关节已运动至一侧极限位置时,继续点击同方向按钮将不再响应, 需点击反方向按钮使关节离开极限,才能继续控制。
按钮对应操作说明见下方:
① 基础关节 —— B L / B R
基础关节是机械臂底座的旋转关节,控制整个机械臂左右转动。
- 转动范围:360°(-3.14~3.14 弧度)
- 开机后基础关节会自动转至中位,此时数字显示为 0
| 按钮 | 操作说明 |
|---|---|
B L | 持续点击,基础关节向左转动,角度数值增大 |
B R | 持续点击,基础关节向右转动,角度数值减小 |
从中位出发:
- 持续点击
B L至极限,数字由 0 增大至 3.14(左转 180°);- 持续点击
B R至极限,数字由 0 减小至 -3.14(右转 180°)。
② 肩关节 —— S D / S U
肩关节控制机械臂大臂的前后俯仰。
- 转动范围:180°(-1.57~1.57 弧度)
- 开机后基础关节会自动转至中位,此时数字显示为 0
| 按钮 | 操作说明 |
|---|---|
S D | 持续点击,肩关节向前转动,角度数值增大 |
S U | 持续点击,肩关节向后转动,角度数值减小 |
从中位出发:
- 持续点击
S D至极限,数字由 0 增大至 1.57(向前转 90°);- 持续点击
S U至极限,数字由 0 减小至 -1.57(向后转 90°)。
③ 肘关节 —— E D / E U
肘关节控制机械臂小臂的前后弯曲。
- 转动范围:180°(0~3.14 弧度)
- 开机后基础关节会自动转至中位,此时数字显示为 1.57(即小臂与大臂呈 90°)
| 按钮 | 操作说明 |
|---|---|
E D | 持续点击,肘关节向前转动,角度数值增大 |
E U | 持续点击,肘关节向后转动,角度数值减小 |
从中位出发:
- 持续点击
E D至极限,数字由 1.57 增大至 3.14(向前转 90°);- 持续点击
E U至极限,数字由 1.57 减小至 0(向后转 90°)。
④ 末端关节 —— H+ DG / H- UG
末端关节根据安装的末端执行器形态分为夹爪和手腕两种,请根据实际安装形态查阅对应说明。
根据下图对照机械臂末端实物:左图为夹爪形态,右图为手腕形态。
 |  |
|---|
-
夹爪形态:
- 转动范围:135°(1.08~3.14 弧度)
- 开机后夹爪会自动转至中位,默认为闭合状态,此时数字显示为 3.14
按钮 操作说明 H+ DG持续点击,夹爪收紧,角度数值增大 H- UG持续点击,夹爪张开,角度数值减小 从中位出发:
- 夹爪默认开机即为闭合状态(3.14);
- 持续点击
H- UG至极限,数字由 3.14 减小至 1.08(最大张开 90°)。
-
手腕形态:
- 转动范围:270°(1.08~5.20 弧度)
- 开机后手腕会自动转至中位,此时数字显示为 3.14
按钮 操作说明 H+ DG持续点击,手腕向下转动,角度数值增大 H- UG持续点击,手腕向上转动,角度数值减小 从中位出发:
- 持续点击
H+ DG至极限,数字由 3.14 增大至 5.02(向下转 135°); - 持续点击
H- UG至极限,数字由 3.14 减小至 1.08(向上转 135°)。
⑤ 所有关节复位 —— INIT
点击 INIT 后,所有关节将自动运动回中位状态(即出厂默认的初始位置),如下图所示。
 机械臂各关节中位示意图
机械臂各关节中位示意图
INIT 回的是中位,而非用户自定义的初始位置。若您已通过[自定义初始位置教程]修改了上电初始位置,点击 INIT 后机械臂仍将回到中位,而非您设定的初始位置。
1.2 关节转动范围汇总
| 关节 | 中位(弧度) | 转动范围 | 最小值(弧度) | 最大值(弧度) |
|---|---|---|---|---|
| 基础关节 | 0 | 360° | -3.14 | 3.14 |
| 肩关节 | 0 | 180° | -1.57 | 1.57 |
| 肘关节 | 1.57 | 180° | 0 | 3.14 |
| 末端关节(夹爪形态) | 3.14 | 135° | 1.08 | 3.14 |
| 末端关节(手腕形态) | 3.14 | 270° | 1.08 | 5.20 |
- 软件上,各关节均设有限位(如上),机械臂在通电状态时(除扭矩锁关闭时),请勿强行将关节掰动,否则可能损坏舵机齿轮;
- 硬件上,各关节也受结构影响,扭矩锁关闭或机械臂未上电时,请勿强行将关节掰动至超出上表范围的位置,否则可能磨损舵机线材。
2. COORDCTRL
ANGLECTRL 是对「每个关节分别下命令」,而 COORDCTRL 模块则是直接告诉机械臂「末端要去哪个位置」——机械臂会自动计算各关节需要如何配合运动。这种方式适合需要精确控制末端位置的场景,例如抓取固定位置的物体。
当您在 COORDCTRL 中输入一个目标坐标,机械臂内部会自动运行「逆运动学」算法:根据目标位置反推出每个关节应旋转到的角度,再驱动各关节执行。用户无需手动计算关节角度,只需输入目标坐标即可实现末端位置控制。
2.1 坐标系说明
在使用坐标控制前,需先了解本机械臂所采用的坐标系定义,才能判断 X +/X -、Y +/Y -、Z +/Z - 各按钮会让末端朝哪个方向移动。
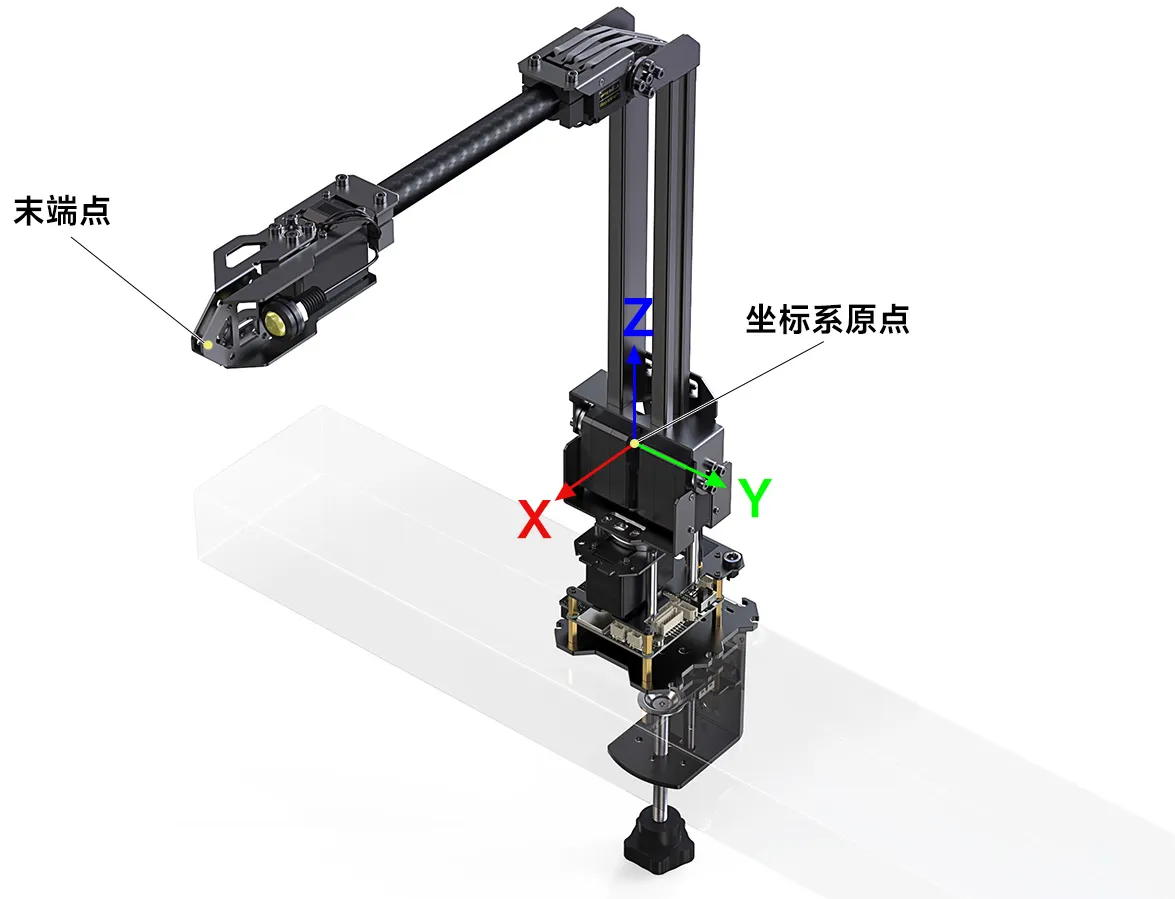 机械臂坐标系标注图
机械臂坐标系标注图
机械臂坐标系基于右手定则定义,具体如下:
| 坐标轴 | 说明 |
|---|---|
| X 轴 | 指向机械臂正前方(水平) |
| Y 轴 | 指向机械臂左侧(水平) |
| Z 轴 | 垂直向上 |
| 坐标系原点 | 机械臂运动坐标系的基准原点,进行坐标控制时的参考位置 |
| 末端点 | 机械臂末端执行器尖端的参考位置点,坐标控制的实际操控目标 |
右手定则是一种快速判断三维坐标系方向的方法,无需对照图纸,用右手就能验证:
- 伸出右手,自然张开;
- 让食指指向 X 轴正方向(机械臂正前方);
- 让大拇指指向 Z 轴正方向(垂直向上);
- 此时中指自然弯曲所指的方向,即为 Y 轴正方向(机械臂左侧)。
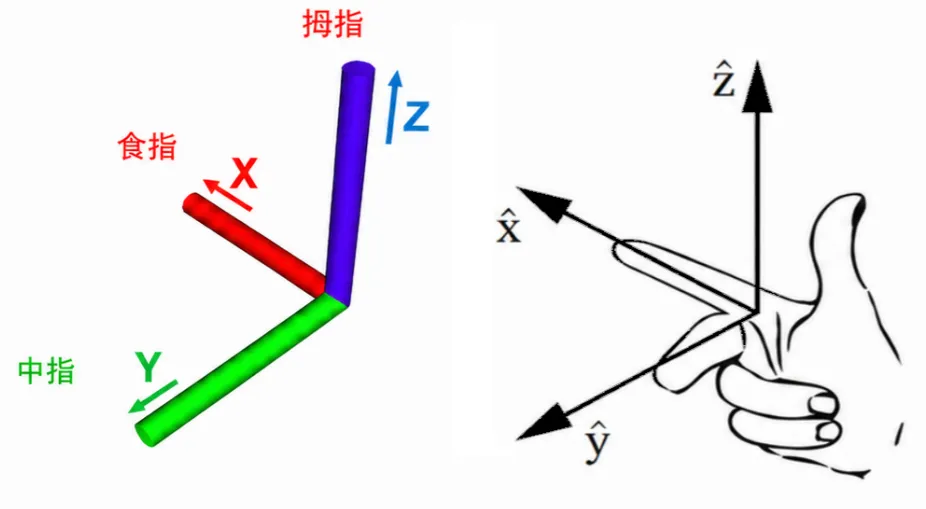 右手定则示意图
右手定则示意图
验证方法:对照机械臂实物,将右手摆成上述图片姿势,确认三个手指方向与机械臂的前方、左侧、上方一致后,即可正确判断各轴的正负方向。
判断坐标轴方向时,可以参考上方坐标系标注图对照机械臂实物进行确认,确认好 X/Y/Z 方向后再操作,避免方向操作错误导致碰撞。
2.2 末端点说明
末端点是机械臂末端执行器尖端的参考位置点,也是坐标控制的实际操控对象。
在坐标控制界面中,界面显示的 X / Y / Z 数值(单位:mm),就是末端点在空间中相对于坐标系原点的位置坐标。当您点击方向按钮时,机械臂会驱动所有关节协同运动,使末端点沿指定方向移动一步,而不是单独转动某一个关节。
例:点击
Z +,末端点会垂直向上移动一段距离,而实际上肩关节和肘关节都在同时调整角度配合这个动作。
末端点的具体位置取决于安装的末端执行器形态:
- 夹爪形态:末端点位于夹爪固定指尖的中间位置;
- 手腕形态:末端点位于手腕末端的中心位置。
因此,更换末端执行器后,末端点的实际空间位置会随之变化,使用时请以实际安装形态为准。
2.3 按钮操作说明
 坐标控制按钮标注图
坐标控制按钮标注图
X +/X -、Y +/Y -、Z +/Z - 按钮上方显示的数字,是机械臂末端点的位置坐标(单位:mm),默认显示为 100 mm。
T +/T - 是末端关节(夹爪/手腕)的旋转角度(弧度制),与 ANGLECTRL 中的末端关节说明对应。
各按钮对应的操作说明如下:
| 按钮 | 操作说明 |
|---|---|
X + | 末端向机械臂正前方移动 |
X - | 末端向机械臂正后方移动 |
Y + | 末端向机械臂左侧移动 |
Y - | 末端向机械臂右侧移动 |
Z + | 末端向上移动 |
Z - | 末端向下移动 |
T + | 末端关节正向转动(夹爪收紧 / 手腕向下) |
T - | 末端关节反向转动(夹爪张开 / 手腕向上) |
INIT | 所有关节复位至中位 |
INIT 回的是中位,而非用户自定义的初始位置。若您已通过[自定义初始位置教程]修改了上电初始位置,点击 INIT 后机械臂仍将回到中位,而非您设定的初始位置。
3. OTHER FUNCTIONS
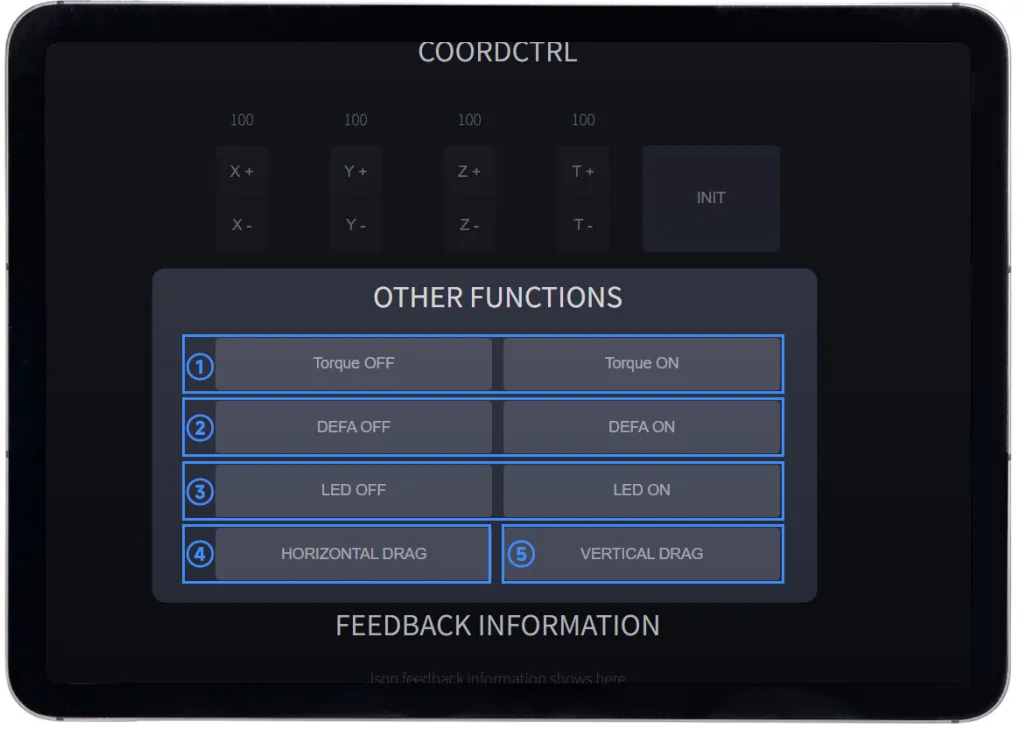 其它功能按钮标注图
其它功能按钮标注图
按钮对应操作说明见下方。
3.1 Torque OFF / ON
该功能决定了关节舵机的扭矩锁是否处于「锁紧」状态:
| 按钮 | 含义 | 适用场景 |
|---|---|---|
Torque OFF | 关闭扭矩锁,舵机扭矩释放,可以用手自由掰动各关节 | 手动摆位、示教录制时使用 |
Torque ON(默认) | 打开扭矩锁,舵机锁紧,关节保持当前位置,外力无法掰动 | 正常控制时使用 |
- 各关节在开启扭矩锁时,请勿用力手动掰动各关节,否则可能损伤舵机齿轮;
- 点击
Torque OFF后,机械臂会先自动运动至水平状态,之后方可用手自由调整各关节角度;
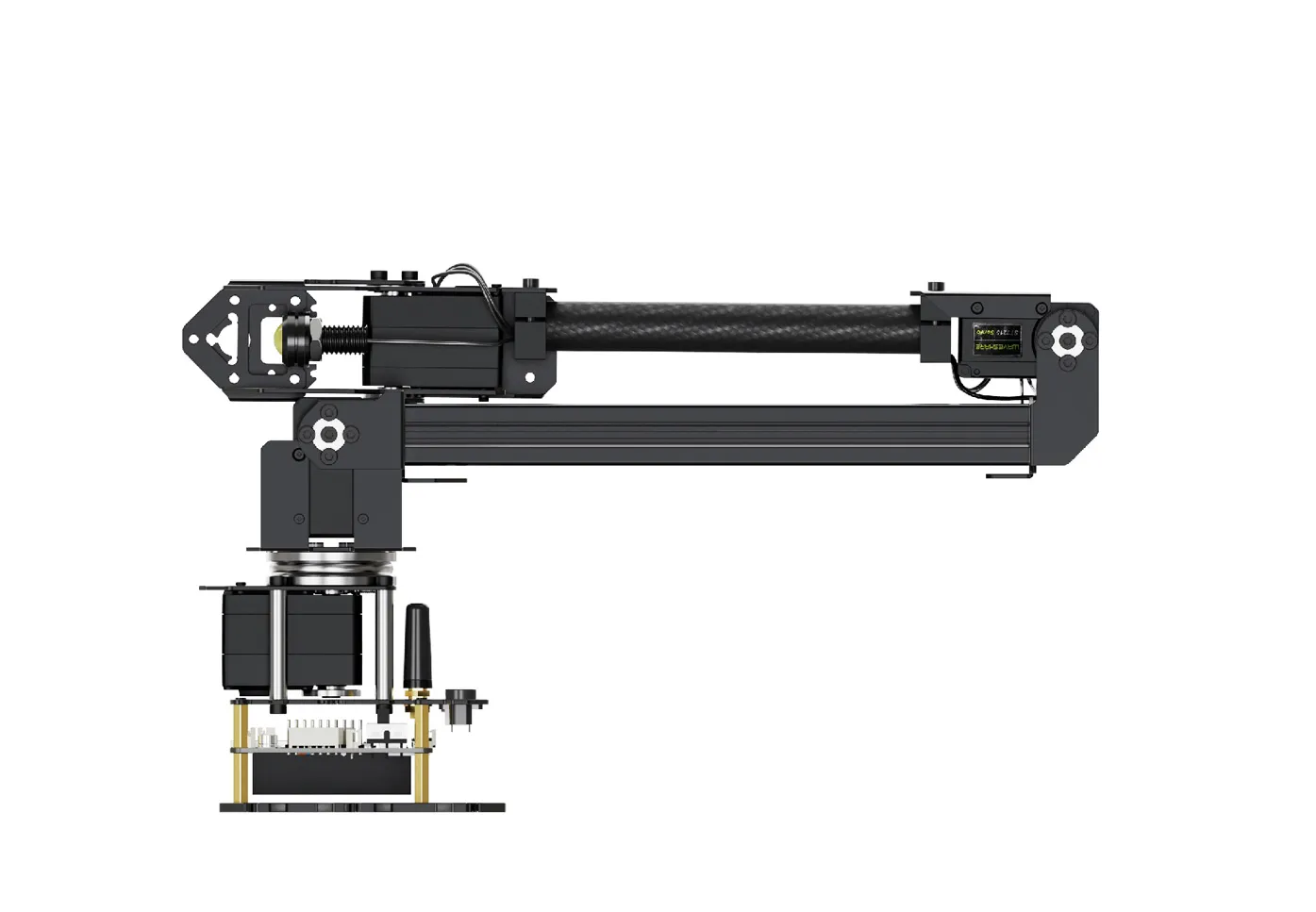 机械臂水平状态示意图
机械臂水平状态示意图
- 扭矩关闭后机械臂依靠自身结构支撑,切勿在此状态下施加超过额定负载的外力,以免损伤关节;
- 扭矩关闭期间,若机械臂的任意关节接收到转动指令(例如点击了 ANGLECTRL 或 COORDCTRL 的按钮),扭矩锁将自动重新开启。
3.2 DEFA OFF / ON
DEFA(Dynamic External Force Adaptive,动态外力自适应)是一种柔性交互功能,DEFA OFF / ON 用于快速切换该功能的开关状态。
开启该功能后,机械臂会为每个关节设置一个最大输出扭矩上限:
- 当你用手施加的外力超过该上限时,对应关节会随外力方向转动;
- 当外力减小到低于上限时,关节会自动回弹至转动前的位置。
| 按钮 | 状态 | 含义 |
|---|---|---|
DEFA OFF | 关闭动态外力自适应(默认) | 所有关节恢复满扭矩输出,外力无法推动关节 |
DEFA ON | 开启动态外力自适应 | 关节扭矩受限,超过阈值的外力可推动关节,松手后自动回弹 |
开启 DEFA 后,各关节的最大输出扭矩上限默认如下(单位:0.1%):
| 关节 | 默认扭矩上限 |
|---|---|
| 基础关节 | 60 |
| 肩关节 | 110 |
| 肘关节 | 50 |
| 末端关节 | 50 |
扭矩上限越大,所需的外力也越大,机械臂回弹速度也越快;反之,扭矩上限越小,外力越小即可推动关节,但回弹速度会随之变慢。
出于以下两点考虑,默认值设置得较小:
- 保护机械臂:较小的扭矩上限让关节更容易随外力让步,减少意外碰撞对舵机齿轮的冲击;
- 便于手动引导:较小的阈值意味着不需要很大的力就能推动关节,操作更省力。
因此,当扭矩上限较低时,在某些位置关节可能出现回弹缓慢甚至无法顺畅回弹的情况,这属于正常现象,并非故障。
- 碰撞缓冲保护:机械臂运动过程中若意外触碰到障碍物,关节会顺着阻力方向让步,避免强行硬顶而损坏设备;
- 手动引导辅助:相较于完全释放扭矩的
Torque OFF,开启 DEFA 后只需施加超过阈值的力即可引导关节运动,松手后关节自动回弹复位,无需手动操作复位按钮,更适合快速摆位场景。
后续会提供修改最大输出扭矩限制的 JSON 指令。建议根据实际使用场景合理设置扭矩上限值。
3.3 LED OFF / ON
控制机械臂末端的 LED 补光灯开关,可用于视觉识别、拍摄等需要补光的场景。
| 按钮 | 含义 |
|---|---|
LED OFF | 关闭 LED 灯 |
LED ON | 打开 LED 灯 |
3.4 HORIZONTAL DRAG
点击 HORIZONTAL DRAG 会进入该功能的专属控制界面(或可通过在浏览器的网址栏中输入 192.168.4.1/horiDrag 也可进入)。
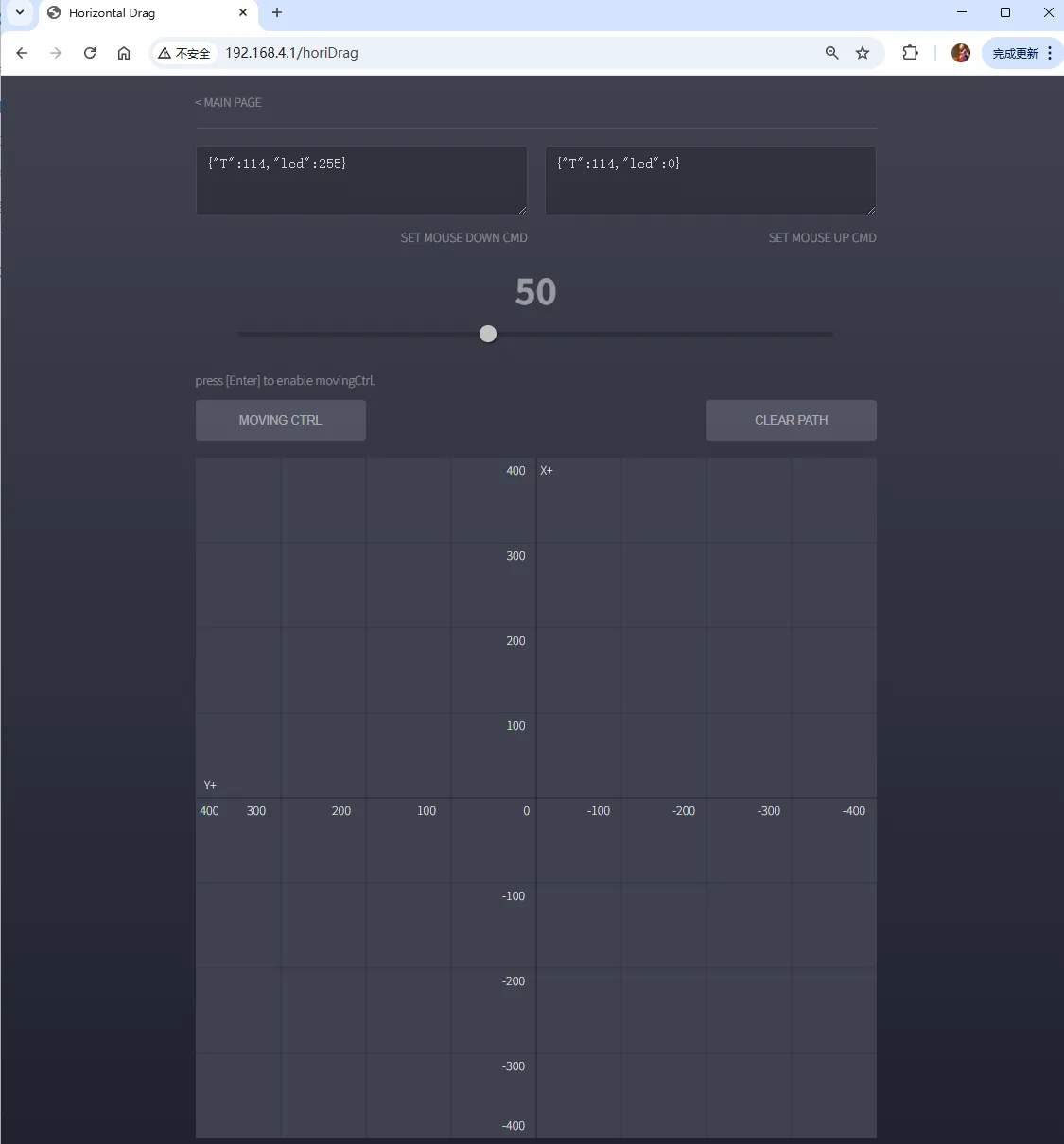 HORIZONTAL DRAG 控制界面图
HORIZONTAL DRAG 控制界面图
在此界面中可通过控制鼠标在绘画区上的位置,驱动机械臂末端点在水平平面(X-Y 平面) 内自由移动。参考下图,X 轴与 Y 轴构成了水平平面。
机械臂坐标系标注图
具体请参考坐标系说明的部分。
3.4.1 界面说明
HORIZONTAL DRAG 控制界面从上到下共分为以下功能区域:






| 区域 | 图片 | 功能概述 |
|---|---|---|
| SET MOUSE DOWN CMD | 设置后,鼠标左键在绘画区按下时执行的 JSON 指令,默认为点亮 LED 灯 | |
| SET MOUSE UP CMD | 设置后,鼠标左键在绘画区松开时执行的 JSON 指令,默认为关闭 LED 灯 | |
| 进度条(数值显示) | 控制末端点在 Z 轴方向(垂直高度)上的位置,也可通过鼠标滚轮调节 | |
| MOVING CTRL | 开启 / 关闭绘画控制模式的按钮 | |
| CLEAR PATH | 清除绘画区上所有移动轨迹 | |
| 绘画区(X-Y 坐标系) | 末端点的水平平面控制区,鼠标位置对应末端点的 X / Y 坐标 |
3.4.2 使用步骤
开启绘画控制后,机械臂末端点会立即运动至鼠标当前所在的坐标位置。
因此,请在开启前,确保鼠标不在绘画区内,以防机械臂末端突然快速位移造成碰撞或伤害。
-
开启绘画控制
按下键盘
Enter键,或点击MOVING CTRL按钮,即可开启绘画控制模式。开启成功后,
MOVING CTRL按钮上方会出现以下提示:movingCtrl: Enable开启后,建议先将鼠标从区域上 X+ 的位置缓慢地移入绘画区,让机械臂末端以较慢的速度跟随到目标位置,避免因位置差距过大而快速运动。
-
控制末端点移动
将鼠标移入绘画区(XY 坐标轴区域)后,机械臂末端点会随鼠标位置实时移动:
- 鼠标在画布内的位置,对应末端点在水平平面内的 X / Y 坐标;
- 向上滚动鼠标滚轮,末端点 Z 轴升高;向下滚动,末端点 Z 轴降低;
- 也可以拖动界面上方的进度条来调节 Z 轴高度,当前高度值显示在进度条上方。
-
绘制轨迹
- 按住鼠标左键并拖动:LED 灯开启、末端点移动的同时,绘画区上会留下移动轨迹;
- 仅移动鼠标(不按键):末端点跟随移动,但不留下轨迹;
- 按
Space空格键,或点击CLEAR PATH按钮,可清除绘画区上的所有轨迹。
-
关闭绘画控制
再次按下
Enter键,或点击MOVING CTRL按钮,即可关闭绘画控制模式。关闭后,
MOVING CTRL按钮上方会显示:movingCtrl: Disable
3.4.3 灯光联动功能
在绘画区中按住鼠标左键时,末端 LED 灯会自动点亮;松开左键后 LED 灯自动熄灭。灯光亮度由界面上方的两个指令框设置:
| 指令框 | 触发时机 | 默认指令 | 说明 |
|---|---|---|---|
| SET MOUSE DOWN CMD | 鼠标在绘画区中左键按下时 | {"T":114,"led":255} | led 为 255 时 LED 最亮 |
| SET MOUSE UP CMD | 鼠标在绘画区中左键松开时 | {"T":114,"led":0} | led 为 0 时 LED 关闭 |
led 的取值范围为 0 ~ 255,数值越大亮度越高。
如需调整按下时的亮度,直接在 SET MOUSE DOWN CMD 框中修改 led 后的数值即可,例如下述指令即设置为半亮:
{"T":114,"led":128}
完成以上操作后,可点击界面左上角 < MAIN PAGE 返回主控制界面,继续学习机械臂的其他功能。
3.5 VERTICAL DRAG
点击 VERTICAL DRAG 会进入该功能的专属控制界面(或可通过在浏览器的网址栏中输入 192.168.4.1/vertDrag 也可进入)。
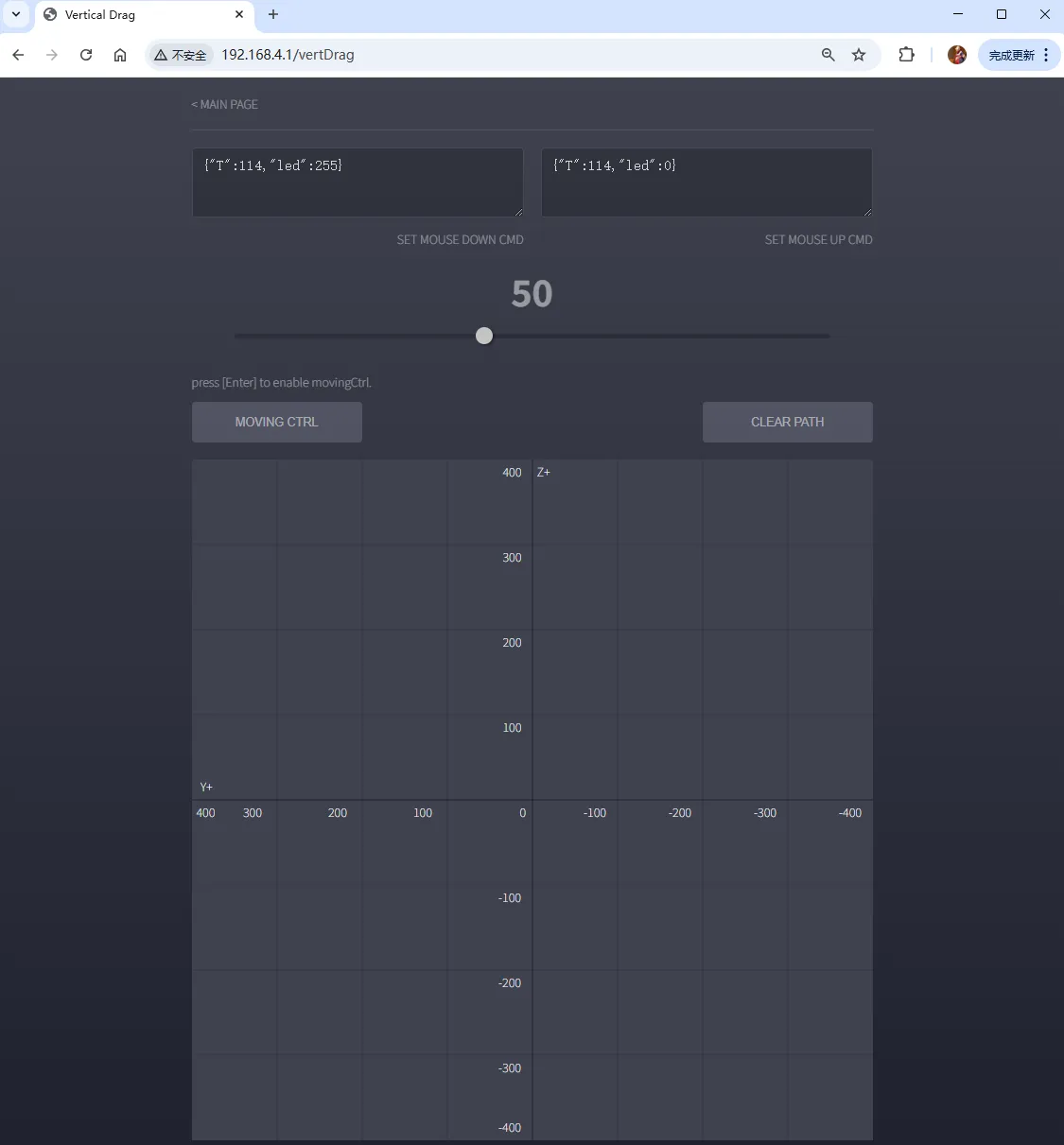 VERTICAL DRAG 控制界面图
VERTICAL DRAG 控制界面图
在此界面中可通过控制鼠标在绘画区上的位置,驱动机械臂末端点在垂直平面(Y-Z 平面) 内自由移动。参考下图,Y 轴与 Z 轴构成了垂直平面。
机械臂坐标系标注图
具体请参考坐标系说明的部分。
3.5.1 界面说明
VERTICAL DRAG 控制界面从上到下共分为以下功能区域:

| 区域 | 图片 | 功能概述 |
|---|---|---|
| SET MOUSE DOWN CMD | 设置后,鼠标左键在绘画区按下时执行的 JSON 指令,默认为点亮 LED 灯 | |
| SET MOUSE UP CMD | 设置后,鼠标左键在绘画区松开时执行的 JSON 指令,默认为关闭 LED 灯 | |
| 进度条(数值显示) | 控制末端点在 X 轴方向上的位置,也可通过鼠标滚轮调节 | |
| MOVING CTRL | 开启 / 关闭绘画控制模式的按钮 | |
| CLEAR PATH | 清除绘画区上所有移动轨迹 | |
| 绘画区(Y-Z 坐标系) | 末端点的垂直平面控制区,鼠标位置对应末端点的 Y / Z 坐标 |
3.5.2 使用步骤
开启绘画控制后,机械臂末端点会立即运动至鼠标当前所在的坐标位置。
因此,请在开启前,确保鼠标不在绘画区内,以防机械臂末端突然快速位移造成碰撞或伤害。
-
开启绘画控制
按下键盘
Enter键,或点击MOVING CTRL按钮,即可开启绘画控制模式。开启成功后,
MOVING CTRL按钮上方会出现以下提示:movingCtrl: Enable开启后,建议先将鼠标从区域上 Z+ 的位置缓慢地移入绘画区,让机械臂末端以较慢的速度跟随到目标位置,避免因位置差距过大而快速运动。
-
控制末端点移动
将鼠标移入绘画区(Y-Z 坐标轴区域)后,机械臂末端点会随鼠标位置实时移动:
- 鼠标在画布内的位置,对应末端点在水平平面内的 Y / Z 坐标;
- 向上滚动鼠标滚轮,末端点 X 轴前进;向下滚动,末端点 X 轴后退;
- 也可以拖动界面上方的进度条来调节 X 轴位置,当前位置值显示在进度条上方。
-
绘制轨迹
- 按住鼠标左键并拖动:LED 灯开启、末端点移动的同时,绘画区上会留下移动轨迹;
- 仅移动鼠标(不按键):末端点跟随移动,但不留下轨迹;
- 按
Space空格键,或点击CLEAR PATH按钮,可清除绘画区上的所有轨迹。
-
关闭绘画控制
再次按下
Enter键,或点击MOVING CTRL按钮,即可关闭绘画控制模式。关闭后,
MOVING CTRL按钮上方会显示:movingCtrl: Disable
3.5.3 灯光联动功能
在绘画区中按住鼠标左键时,末端 LED 灯会自动点亮;松开左键后 LED 灯自动熄灭。灯光亮度由界面上方的两个指令框设置:
| 指令框 | 触发时机 | 默认指令 | 说明 |
|---|---|---|---|
| SET MOUSE DOWN CMD | 鼠标在绘画区中左键按下时 | {"T":114,"led":255} | led 为 255 时 LED 最亮 |
| SET MOUSE UP CMD | 鼠标在绘画区中左键松开时 | {"T":114,"led":0} | led 为 0 时 LED 关闭 |
led 的取值范围为 0 ~ 255,数值越大亮度越高。
如需调整按下时的亮度,直接在 SET MOUSE DOWN CMD 框中修改 led 后的数值即可,例如下述指令即设置为半亮:
{"T":114,"led":128}
完成以上操作后,可点击界面左上角 < MAIN PAGE 返回主控制界面,继续学习机械臂的其他功能。
4. FEEDBACK INFORMATION
FEEDBACK INFORMATION 区域是 Web 界面与机械臂之间进行「双向通信」的窗口,也是直接发送 JSON 指令控制机械臂的入口。
JSON(JavaScript Object Notation)是一种轻量级的数据格式,以键:值的方式组织信息,可读性高,易于在不同系统之间传输和解析。机械臂通过接收 JSON 格式的指令来执行各类动作。
以下是控制机械臂运动到某一坐标位置的 JSON 指令示例:
{"T":1041,"x":200,"y":0,"z":150,"t":3.14}
其中 "T" 是指令类型编号,其余字段是该指令对应的参数。
通过发送不同的 JSON 指令,可以实现 Web 界面按钮之外的更多功能。关于每条指令的具体含义和参数说明,请参阅 [JSON 指令功能详解]。
 信息反馈区标注图
信息反馈区标注图
- ① 状态信息显示区:发送的 JSON 指令反馈的信息会在这里显示;
- ② JSON 指令发送区:输入 JSON 格式指令并点击
SEND发送,实现对机械臂的精细控制。
这个界面 JSON 指令有以下两种发送方式:
-
手动输入指令:
① 在发送区中输入 JSON 格式的指令,例如:
{"T":114,"led":255}② 点击
SEND按钮发送;③ 上方显示区将展示机械臂返回的信息。
-
使用快捷指令:
FEEDBACK INFORMATION 区域下方列出了机械臂常用的 JSON 指令,每条指令旁均有
INPUT按钮:① 点击
INPUT后,该指令会自动填入上方发送区的输入框中;② 确认或修改参数后,点击
SEND发送。
快捷指令区包含查询机械臂状态、设置 WiFi 模式等常用操作。初次使用时,推荐先通过快捷指令熟悉各类 JSON 指令的格式,再尝试手动编写。
至此,您已了解 Web 控制界面的全部功能模块。如果想进一步通过发送 JSON 指令或 Python 程序来控制机械臂,请继续阅读 JSON 指令发送方式。