Web 端其余功能
坐标控制(COORDCTRL)
前置知识
机器人中的坐标系和方向判断
机器人学中使用笛卡尔坐标系(右手坐标系)来描述机器人在三维空间中的位置和姿态。
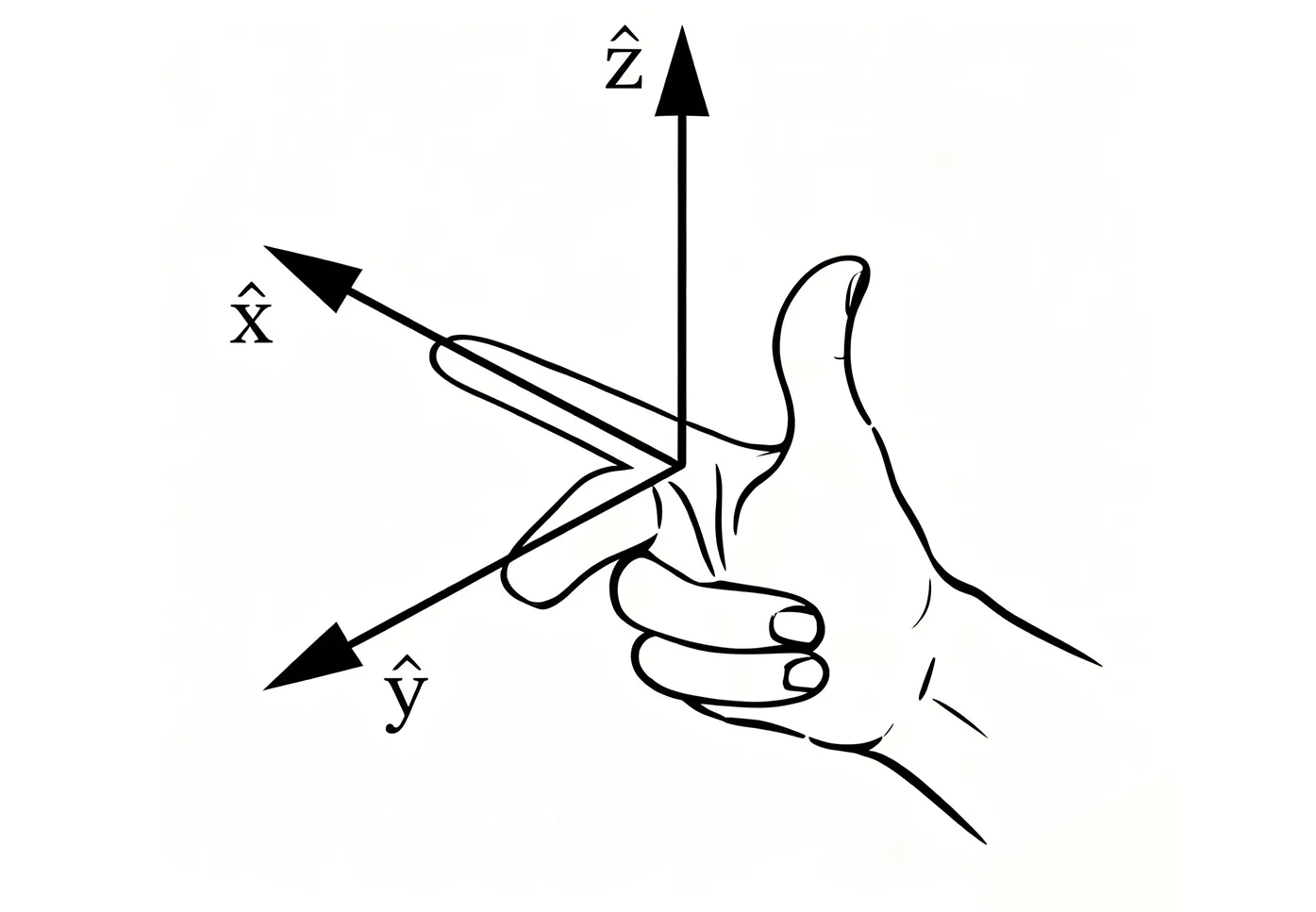
右手定则说明:
- 伸出右手,自然张开;
- 让食指指向 X 轴正方向(机械臂正前方);
- 让大拇指指向 Z 轴正方向(垂直向上);
- 此时中指自然弯曲所指的方向,即为 Y 轴正方向(机械臂左侧)。
验证方法: 对照机械臂实物,将右手摆成上述姿势,确认三个手指方向与机械臂的前方、左侧、上方一致后,即可正确判断各轴的正负方向。
注意事项: 判断坐标轴方向时,可以参考上方坐标系标注图对照机械臂实物进行确认,确认好 X/Y/Z 方向后再操作,避免方向操作错误导致碰撞。
坐标系平面定义:
- XY 平面:水平工作平面(X 轴和 Y 轴构成)
- XZ 平面:垂直平面(X 轴和 Z 轴构成)
- YZ 平面:侧向平面(Y 轴和 Z 轴构成)
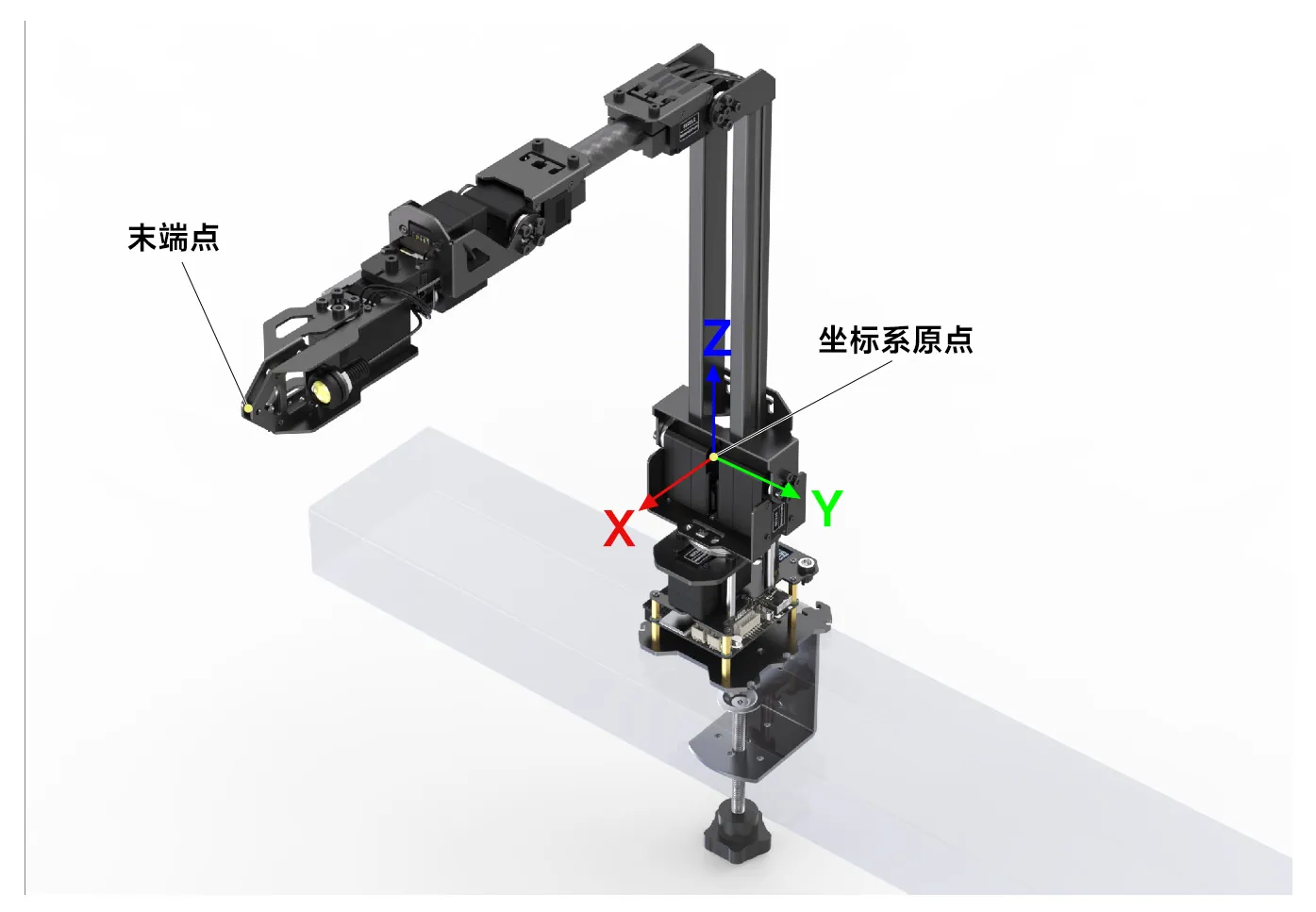
在 RoArm-M3 机械臂中,通常以基座为坐标系原点,Z 轴垂直向上为正方向。
坐标控制参数说明
坐标控制参数含义
- X、Y、Z:分别代表机械臂末端关节末端点的 X 轴、Y 轴和 Z 轴位置坐标
- T:代表机械臂末端点在竖直平面内的角度,通过坐标点逆解出各关节需要转动的角度
- R:代表手腕关节 2 的转动角度(详见 AngleCtrl 功能中的"R+ DG"列)
- G:代表末端关节的转动角度(详见 AngleCtrl 功能中的"G+ DG"列)
- INIT:点击后末端点会复位至产品开机时的中位位置
以上六个参数均可通过"+"和"-"按钮进行调节。
绘画功能
按钮功能说明
| 绘画按钮功能 | 功能解释 |
|---|---|
| HORIZONTAL DRAG | 用鼠标操控机械臂在水平平面绘画 |
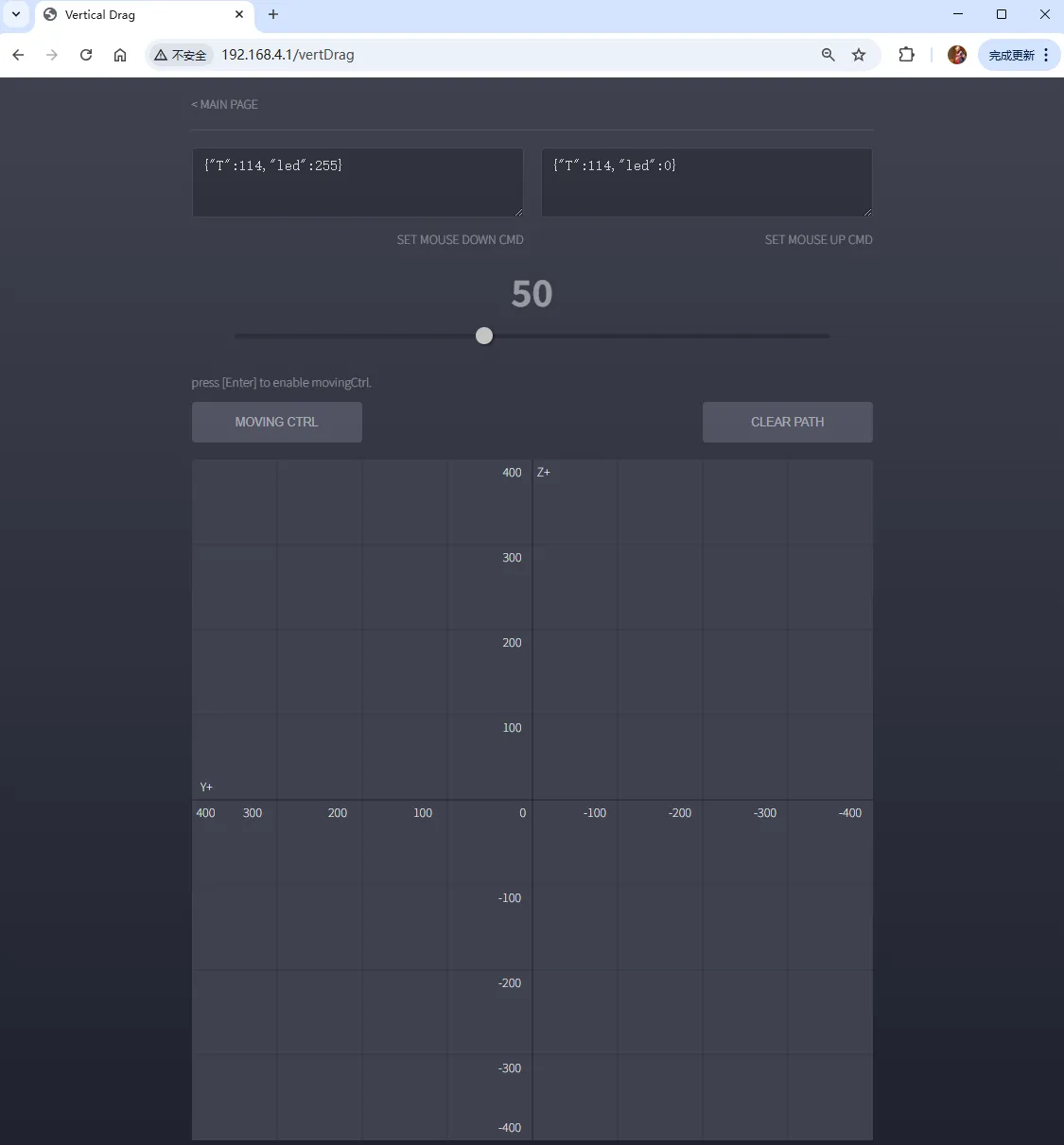
| VERTICAL DRAG | 用鼠标操控机械臂在垂直平面绘画 |
绘画功能界面及功能解释
| 区域 | 图片 | 功能概述 |
|---|---|---|
| SET MOUSE DOWN CMD |  | 设置后,鼠标左键在绘画区按下时执行的 JSON 指令,默认为点亮 LED 灯 |
| SET MOUSE UP CMD |  | 设置后,鼠标左键在绘画区松开时执行的 JSON 指令,默认为关闭 LED 灯 |
| 进度条(数值显示) |  | 控制末端点在 X 轴方向上的位置,也可通过鼠标滚轮调节 |
| MOVING CTRL |  | 开启 / 关闭绘画控制模式的按钮 |
| CLEAR PATH |  | 清除绘画区上所有移动轨迹 |
| 绘画区(Y-Z 坐标系) |  | 末端点的垂直平面控制区,鼠标位置对应末端点的 Y / Z 坐标 |
注意
- 开启绘画功能前,确保鼠标光标位于绘画区域外,以免功能启动时机械臂移至光标所在坐标,影响绘画效果。
- LED 亮度值:0→255(关闭→最亮)
挑战任务
使用绘画功能实现操控机械臂跳一段舞!