常见问题 (FAQ)
问:RoArm-M3-S 和 RoArm-M3-Pro 两个型号的区别在哪?
答:RoArm-M3-S 使用的舵机为工程塑胶外壳的 ST3215 Servo 和 ST3215-HS Servo;而 RoArm-M3-Pro 除手腕关节 2 和末端关节之外的其余关节使用的舵机为金属外壳的 ST3235 Servo,金属外壳的舵机虚位会更小,不会随着使用时间而增大。
问:WSLg 环境下 RViz2 窗口没有显示,如何处理?
答:WSLg 环境下,若 Linux GUI 程序已经启动,Windows 任务栏有图标,但 RViz2 或测试窗口不显示,按以下步骤重启 WSLg 图形层。
在 RoArm_M3 终端中清理相关进程:
killall -9 xeyes glxgears rviz2 2>/dev/null
pkill -f joint_state_publisher_gui 2>/dev/null
pkill -f robot_state_publisher 2>/dev/null
以管理员身份打开 Windows PowerShell,关闭 WSL 和远程桌面图形进程:
wsl --shutdown
taskkill /IM msrdc.exe /F
taskkill /IM mstsc.exe /F
重新进入 RoArm_M3 发行版:
wsl -d RoArm_M3
再次执行统一初始化命令并启动需要的例程。
问:使用串口通信发送 JSON 指令或 ROS2 控制机械臂没有反应?
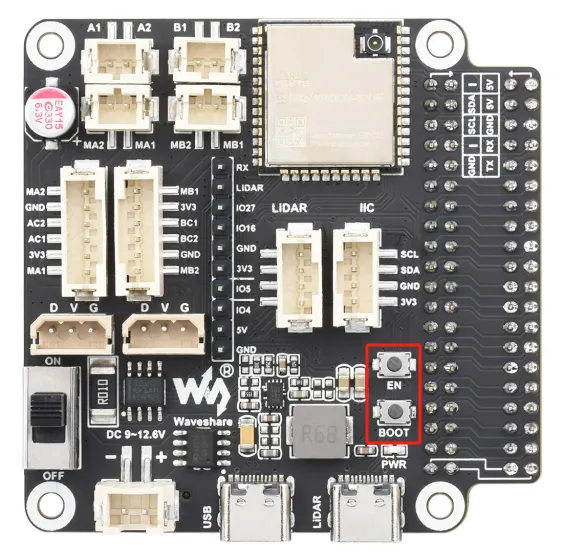
答:首先检查是否已给机械臂供电,并确认驱动板电源开关已打开;电源接口及电源开关标注见 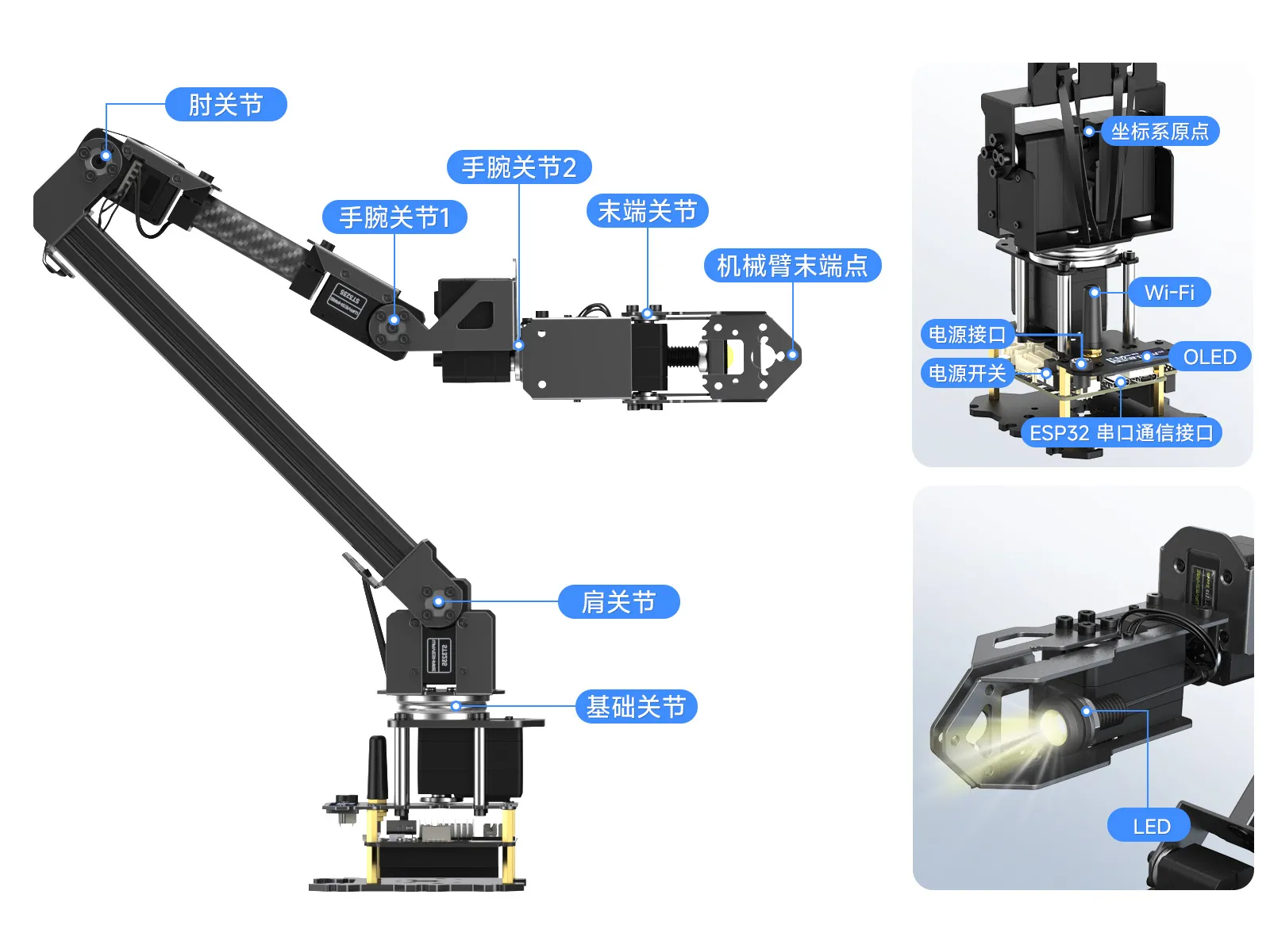 。接着对照 机器人通用驱动板板载接口 部分,确保 USB 线连接到序号 ⑨ 的 USB 接口;最后检查串口通信的端口号是否正确。若上述检查完毕后控制机械臂仍无反应,请咨询技术支持。
。接着对照 机器人通用驱动板板载接口 部分,确保 USB 线连接到序号 ⑨ 的 USB 接口;最后检查串口通信的端口号是否正确。若上述检查完毕后控制机械臂仍无反应,请咨询技术支持。
问:使用下载工具或 Arduino IDE 给机器人通用驱动板上传程序时未出现新的 COM 口,是为什么?
答:先对照 机器人通用驱动板板载接口 部分,检查 USB 线是否连接到序号 ⑨ 的 USB 接口。若接口正确,再查看电脑的设备管理器中是否有新的 COM 口出现。若没有,请检查“其它设备”中是否有名称带 CP2102 的未识别设备(如图) 。如果有,说明可能未安装驱动,可安装 CP2102 串口驱动。若“其它设备”中也没有 CP2102 未识别设备,请联系店铺客服返厂维修。
。如果有,说明可能未安装驱动,可安装 CP2102 串口驱动。若“其它设备”中也没有 CP2102 未识别设备,请联系店铺客服返厂维修。
问:使用下载工具或 Arduino IDE 给机器人通用驱动板上传程序时一直显示 Connecting,或出现 'Failed to connect to ESP32: Timed out waiting for packet header',是什么原因?
答:出现这种情况通常是机器人通用驱动板自动下载电路未正常触发。此时需要拔掉 USB 线后重新上传;当上传过程中出现 Connecting... 或 .... 时,按住机器人通用驱动板上的 BOOT 按键不松开,然后按住 EN 键约 1 秒后松开,最后再松开 BOOT 键。若多次操作后仍上传不成功,请联系店铺客服返厂维修。
问:重新给产品上传程序后,连接 WiFi 出现密码错误或者其它连接不上的情况,该如何解决?
答:重新烧录程序后,可通过串口通信发送以下指令重置 WiFi 配置:
{ "T": 604}
然后给机械臂重新上电,在手机或电脑上忘记已保存的机械臂 WiFi,再重新连接。
问:Web 端无法访问,输入 192.168.4.1 后无法打开控制界面?
答:首先确认机械臂处于 AP 模式(开机后默认模式),检查手机/电脑是否已连接到机械臂的 WiFi 热点(默认 SSID 为 RoArm-M3,默认密码为 12345678)。如果已连接但仍无法访问,尝试清除浏览器缓存或更换浏览器。如果机械臂处于 STA 或 AP+STA 模式,需在机械臂 OLED 屏幕上查看路由器分配的 IP 地址,并使用该 IP 地址访问。
问:通过 JSON 指令控制单个关节时,某个关节没有明显动作,该如何排查?
答:先停止继续发送同类 JSON 指令,按以下顺序排查:
- 在 Web 端打开 舵机角度控制 区域,使用对应关节的角度控制按钮单独测试该关节是否可以转动。
- 如果 Web 端舵机角度控制可以让该关节转动,再回到 MOVING CTRL 区域,重新选择对应 JSON 命令并发送。
- 检查 JSON 中的
joint、rad、spd、acc字段是否为英文半角字符,并确认关节编号与文档中的关节表一致。 - 检查关节附近是否有线材、外壳、夹爪、桌面或其它物体限制运动,确认没有卡线、卡滞、碰撞或接近机械限位。
- 如果 Web 端舵机角度控制也无法让该关节转动,检查供电状态、舵机连接和机械装配状态。
完成上述检查后,再从较小角度开始测试 JSON 指令。若其它关节正常而某个关节长期无反应,记录当前 JSON、供电状态和反馈信息,再检查该关节舵机连接或校准状态。
问:机械臂运动时出现异常声音或卡顿现象?
答:可能是机械臂运动超出工作空间限制、遇到障碍物,或关节姿态与指令不匹配。请先停止操作并断开危险动作来源,检查机械臂周围是否有障碍物,再确认运动指令中的角度/坐标值是否在允许范围内。如果问题持续存在,请检查各关节连接是否松动、线缆是否牢固,并联系技术支持进一步排查。
问:ROS2 环境下机械臂无法正常通信或控制?
答:首先确认机械臂驱动节点已正确启动,检查 ROS2 网络配置,确保机械臂与 ROS2 主机在同一网络。使用ros2 node list和ros2 topic list确认节点和话题正常。如果使用虚拟机环境,确保网络桥接模式设置正确。检查防火墙设置是否阻止了 ROS2 通信。
问:机械臂末端执行器(夹爪)无法正常开合?
答:检查夹爪连接线是否牢固,发送夹爪控制指令(如 {"T":106,"cmd":1.57,"spd":0,"acc":0})测试。夹爪弧度范围通常为 1.08~3.14,数值减小时夹爪张开。如果夹爪无反应,检查驱动板上的夹爪接口连接,或通过 Web 端测试夹爪功能。
问:MoveIt2 规划时机械臂运动轨迹不理想或碰撞检测误报?
答:检查 MoveIt2 配置中的碰撞矩阵设置,可能需要调整碰撞检测参数。在 Rviz2 中可视化规划结果,确认轨迹合理性。如果频繁出现碰撞误报,可以适当增大碰撞检测的容差值或优化机械臂的 URDF 模型。
问:拆装后如何重新设置舵机中位?
答:RoArm-M3 出厂已完成装配和中位设置,不建议自行拆卸。若确需拆卸后重新组装,应先关闭扭矩锁,再根据实际关节舵机 ID 设置中位。
{"T":210,"cmd":0}
调整舵机中位时使用:
{"T":502,"id":15}
其中 id 需要替换为对应关节舵机 ID。机械臂从基础关节到末端关节的 ID 为 11~17,肩关节有两个舵机。中位设置不正确可能导致舵机堵转,请谨慎操作。
问:如何扩展机械臂的功能或添加外部传感器?
答:RoArm-M3 的机器人通用驱动板提供 I2C、UART、40PIN 扩展接口等资源。可以通过 40PIN 扩展接口连接树莓派等上位机,或通过 I2C 接口连接 OLED 屏幕、传感器等。支持二次开发,源程序可使用 Arduino IDE 进行开发和上传。
问:机械臂长时间运行后性能下降或发热明显?
答:长时间高负载运行可能导致舵机发热。建议合理安排工作周期,避免连续高强度运行。检查环境温度是否过高,确保良好的散热条件。如果性能明显下降,检查电源供应是否稳定,电压是否在正常范围内。