入门教程
目标
了解 RoArm-M3 机械臂的开机、连接和 Web 端基础控制方法。
1. 准备工作
开箱检查
按照配置清单进行开箱检查,确保配件齐全。

机械臂预检
在给机械臂连接电源之前,请按以下顺序逐项检查设备状态:
- 运输损伤检查: 检查外壳与各关节部件是否存在因运输造成的变形、破损或裂纹。 通过标准: 外观完整,无明显变形或缺损。
- 螺丝紧固检查: 检查整机螺丝是否紧固,重点检查各关节连接部位。 通过标准: 所有螺丝无松动,关节连接稳固。
- 线缆检查:
检查各关节之间的线缆端子固定是否牢固;
检查所有外露线缆是否完整,有无因包装挤压造成的破损或折断。
通过标准: 各个关节之间线缆连接牢固,所有线缆外皮完好,无破损、裸露或异常折痕。 - 关节活动检查: 在未通电状态下轻轻转动各关节,检查活动是否正常,遇到明显阻力时不要强行转动。 通过标准: 机械臂各关节可正常活动,无卡顿感或阻滞感。
以上任意一项检查未通过,请勿上电。请先联系技术支持处理,确认设备状态正常后再继续使用。
2. 外观与接口说明
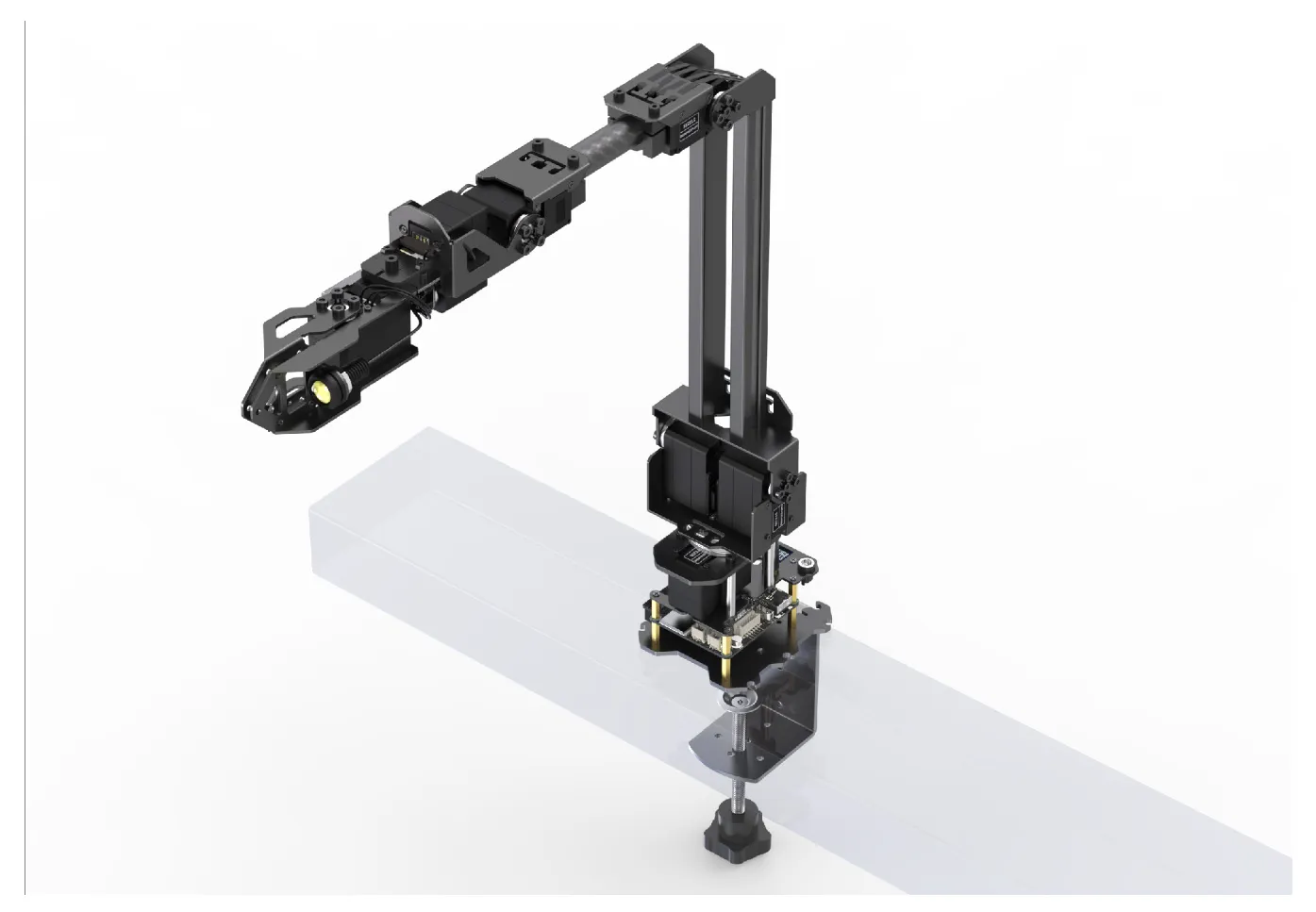
外观图示
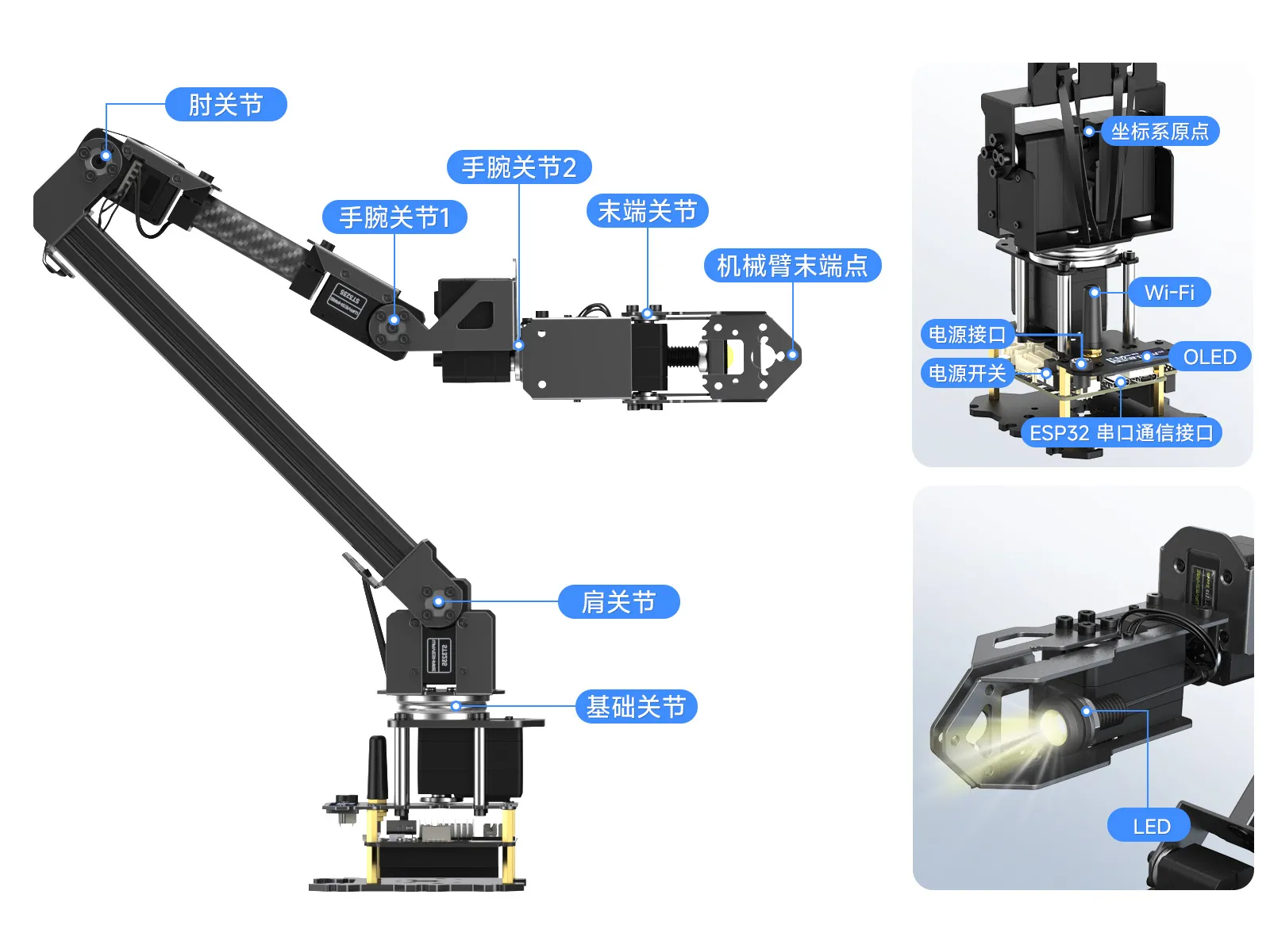
接口说明
| 名称 | 说明 |
|---|---|
| WiFi 天线 | 用于 WiFi 无线通信。 |
| OLED 显示屏 | 显示当前网络模式(AP/STA)、MAC 地址、电压等状态信息。 |
| DC 电源接口 | 电源输入接口,工作电压范围为 DC 7~12.6V,建议使用标配 12V 5A 电源适配器。 |
| 电源开关 | 控制整机供电,拨至 ON 为通电,拨至 OFF 为断电。 |
| USB 串口通信接口 | 用于固件烧录,以及与 PC、树莓派、Jetson 等上位机进行有线串口通信。 |
3. 基础上手
开机
上电前请确认:
- 底座已可靠固定,机械臂周围无遮挡物。
- 人员手部远离机械臂运动范围。
- 首次使用时,请勿挂载重物或执行复杂任务。
确认电源开关处于 OFF(关)状态后,将 12V 5A 电源适配器接入电源接口并接通电源插座,再打开电源开关。启动后,各关节会自动移动到开机中位姿态。

仅插入 USB 线时,驱动板指示灯也可能亮起,但这不代表机械臂已经通过电源适配器正常供电。
请查看 OLED 屏幕上的电压值:
- 显示接近正常工作电压:机械臂已通过电源适配器供电。
- 显示接近 0 V:请检查电源适配器是否接入、电源开关是否打开。
设备初始化
上电后设备会自动进行初始化,初始化过程中机械臂各关节会自动运动至初始位置。请确保机械臂运动范围内无遮挡物。
出厂默认初始位置为各关节的中位姿态。若后续通过软件修改了初始位置,每次上电初始化时机械臂将运动至自定义初始位置。
确认 OLED 屏状态
初始化完成后,OLED 屏幕会显示设备网络和供电状态。
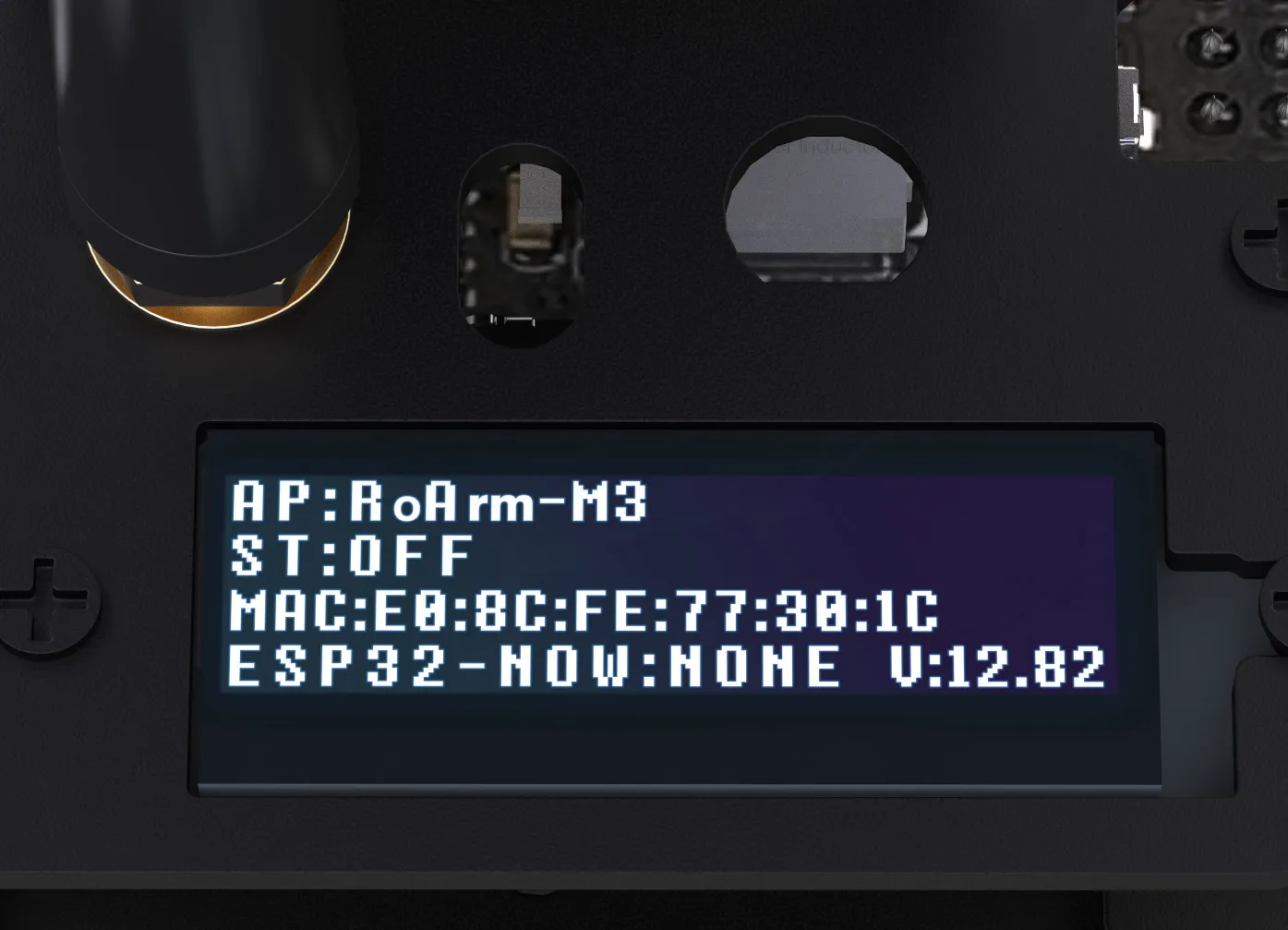
OLED 屏参数含义:
-
AP: WiFi 处于 AP 模式下的热点名称
-
STA: WiFi 的 STA 模式状态,当前为关闭。当 WiFi 处于 STA 模式时,路由器会分配一个 IP 地址并显示出来。
-
MAC: 设备唯一 MAC 地址,用于 ESP-NOW 通信。
-
ESP-NOW:ESP-NOW 通信状态,当前为关闭。
-
V: 机械臂当前电压。
连接 WiFi
使用手机或电脑连接机械臂默认热点:
- WiFi 名称:
RoArm-M3 - WiFi 密码:
12345678
打开 Web 端
建议使用 Chrome 浏览器访问 Web 端,以获得最佳兼容性。
打开 Chrome 浏览器,在网址栏中输入 http://192.168.4.1,进入 Web 端控制界面。
看到 Web 控制界面后,即表示设备连接成功。若无法打开页面,请确认当前手机或电脑已连接到机械臂热点,而不是其它 WiFi 网络。
Web 端主要功能介绍
| 功能界面 | 功能名称 | 功能介绍 |
|---|---|---|
 | 关节角度控制 | 机械臂各个关节角度显示与控制 |
 | 坐标控制 | 在直角坐标系下对末端中心点进行平移与姿态控制,并支持夹爪角度控制 |
 | 信息反馈 | 输入 JSON 指令并发送,在反馈区查看 JSON 信息反馈 |
 | WiFi 设置 | 配置 AP/STA 模式下的 WiFi 连接 |
Web 端简易控制
关节角度控制(ANGLECTRL)
RoArm-M3 各关节名称及转动方向

先对照总览图确认关节位置,再切换下方选项卡查看对应按钮、转动方向和运动范围。
- 基础关节 (BL/BR)
- 肩关节 (SD/SU)
- 肘关节 (ED/EU)
- 手腕关节 1 (W+DG/W-UG)
- 手腕关节 2 (R+DG/R-UG)
- 末端夹爪 (G+DG/G-UG)
| 项目 | 内容 |
|---|---|
| 控制按钮 | BL / BR |
| 控制转动的关节 | 基础关节 |
| 转动方向 | 向左 /向右 |
| 转动范围(对应弧度) | 360°(3.14~-3.14) |
| 说明 | 位于底座转盘处,带动整条机械臂绕底座竖直轴左右旋转。 |
| 项目 | 内容 |
|---|---|
| 控制按钮 | SD / SU |
| 控制转动的关节 | 肩关节 |
| 转动方向 | 向前 / 向后 |
| 转动范围(对应弧度) | 180°(1.57~-1.57) |
| 说明 | 肩关节带动大臂及其后续结构整体前后摆动。 |
| 项目 | 内容 |
|---|---|
| 控制按钮 | ED / EU |
| 控制转动的关节 | 肘关节 |
| 转动方向 | 向下 / 向上 |
| 转动范围(对应弧度) | 180°(3.14~0,开机中位约 1.57) |
| 说明 | 肘关节带动前臂及手腕、夹爪等后续结构摆动。 |
| 项目 | 内容 |
|---|---|
| 控制按钮 | W+DG / W-UG |
| 控制转动的关节 | 手腕关节 1 |
| 转动方向 | 向下 / 向上 |
| 转动范围(对应弧度) | 180°(1.57~-1.57) |
| 说明 | 手腕关节 1 带动末端连杆和夹爪基座前后调整姿态。 |
| 项目 | 内容 |
|---|---|
| 控制按钮 | R+DG / R-UG |
| 控制转动的关节 | 手腕关节 2 |
| 转动方向 | 向右 / 向左 |
| 转动范围(对应弧度) | 360°(3.14~-3.14) |
| 说明 | 手腕关节 2 带动末端执行器绕末端连杆自身轴线旋转。 |
| 项目 | 内容 |
|---|---|
| 控制按钮 | G+DG / G-UG |
| 控制转动的关节 | 末端夹爪关节 |
| 转动方向 | 夹紧 / 张开 |
| 转动范围(对应弧度) | 135°(3.14~1.08) |
| 说明 | 固定夹爪保持不动,活动夹爪绕铰链轴执行开合。 |
- 按下按钮后关节会持续运动,松开按钮后停止,界面示数会随之更新。
- 复位(INIT)会让各关节回到开机时的中位状态。
- 机械臂前倾现象:部分角度按钮在短时间内连续按时会导致机械臂稍微前倾,这是由于舵机虚位导致的正常现象。
挑战任务
用 Web 端控制机械臂移动,夹取附近小物体。
其余单功能按钮说明
| 按钮功能 | 功能解释 | 按钮名称 |
|---|---|---|
| Torque(扭矩锁) | Torque ON 时关节保持锁定,通电状态下不可手动转动;Torque OFF 时可手动调整关节姿态。 | Torque ON / Torque OFF |
| DEFA(动态外力自适应) | 开启后,若用大于扭矩设定的外力转动机械臂,关节会发生转动,但随后会自动回弹至转动前的位置。 | DEFA ON / DEFA OFF |
| LED(LED 灯) | 控制 LED 灯的开关 | LED ON / LED OFF |
挑战任务
先点击 Torque OFF,手动调整机械臂姿态;调整完成后点击 Torque ON,让机械臂保持当前姿态。
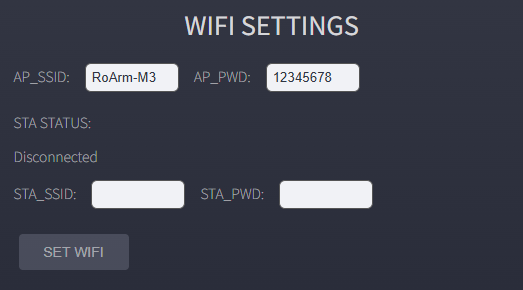
WiFi 设置(WIFI SETTINGS)
这个模块用于配置机械臂驱动板的 WiFi 连接。
-
AP_SSID:AP 模式下的 WiFi 名称,也就是驱动板自建热点的 WiFi 名称。输入框中的
Robot是网页自动填入的出厂默认名称,也是默认名称示例。为安全起见,即使之前配置过自定义AP_SSID,页面上显示的默认名称仍为Robot;默认密码也仍显示为12345678。真实的AP_SSID可通过 OLED 屏幕第一行查看,开机后再次修改的名称不会持续显示在 OLED 屏幕上。 -
AP_PWD:AP 模式下的 WiFi 密码,也就是驱动板自建热点的 WiFi 密码。与
AP_SSID类似,输入框中显示的是网页自动填入的出厂默认密码。可自定义 AP 密码,但自定义后的密码不会在网页上显示出来。 -
STA_STATUS:STA 模式连接状态。如果未配置 STA 连接、附近没有可连接的已知 WiFi,或已知 WiFi 连接失败,这里不会显示连接信息。连接成功后,会显示已连接的 WiFi 热点名称,以及路由器分配给驱动板的 IP 地址。
驱动板支持 AP+STA 模式。通过 AP 模式连接驱动板自建热点并配置
STA_SSID和STA_PWD后,点击 SET WIFI。页面在STA_STATUS下显示热点名称和 IP 地址后,可将手机或电脑切换到同一路由器 WiFi,再用这个 IP 地址打开驱动板 Web 端。 -
STA_SSID:STA 模式下需要连接的 WiFi 名称,也就是路由器热点名称。 -
STA_PWD:STA 模式下需要连接的 WiFi 密码,也就是路由器热点密码。 -
SET WIFI:写入 WiFi 配置。
填入
STA_SSID和STA_PWD后点击该按钮。连接成功后,STA_STATUS下方会显示已连接热点名称和路由器分配给驱动板的 IP 地址。