二次开发
前置知识
什么是Arduino IDE?
Arduino IDE(Integrated Development Environment)是基于开源代码的开发平台,包含代码编辑、编译和上传功能。Arduino 生态提供了多种库,可用于显示器、传感器和通信模块等外设开发。
为什么用Arduino IDE进行二次开发?
RoArm-M3 默认固件基于 Arduino 开发,机器人通用驱动板的主控为 ESP32,因此可使用 Arduino IDE 对驱动板固件进行二次开发。
二次开发用途有哪些?
二次开发可用于修改固件逻辑、增加传感器输入、扩展外设控制、调整控制算法,以及修改串口通信、WiFi 通信或 JSON 指令处理逻辑。
上传新固件会改变驱动板当前程序,操作前应备份原始程序和已配置参数。
1. 二次开发工具安装
-
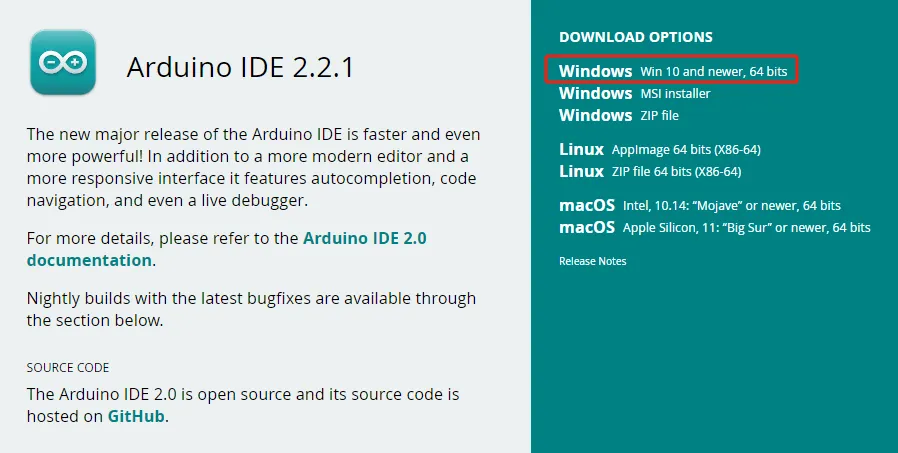
下载 Arduino IDE 前往 Arduino 官网 下载 Arduino IDE 安装包。官方 IDE 支持不同操作系统,按实际系统选择对应版本;已安装 Arduino IDE 时可跳到下一步。
安装过程中若提示安装驱动,按安装向导完成驱动安装。
-
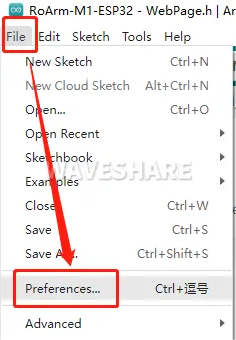
设置 Arduino IDE 为中文界面 第一次安装完成后,Arduino IDE 默认可能为英文界面。点击"File"→"Preferences"。
 在"Language"里面选择简体中文,点击 OK。
在"Language"里面选择简体中文,点击 OK。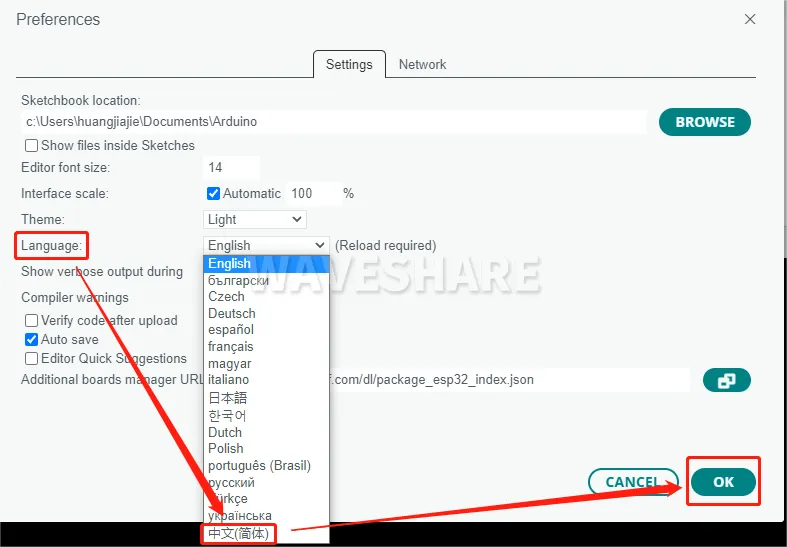
2. 开发环境安装
机械臂驱动板的主控模组是 ESP32,因此 Arduino IDE 中需要安装 ESP32 对应的开发板支持包。步骤如下:
-
打开 Arduino IDE,点击"文件"→"首选项"。
-
在附加开发板管理器网址中添加如下链接,点击"确定"保存设置。
https://dl.espressif.com/dl/package_esp32_index.json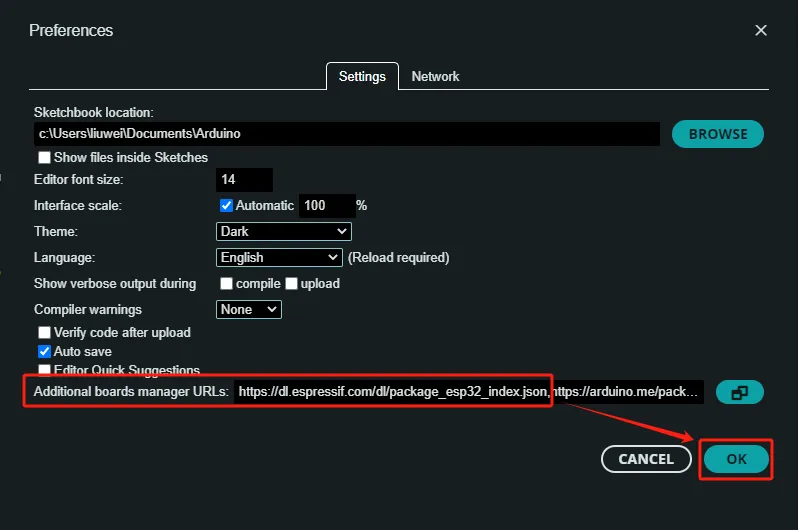
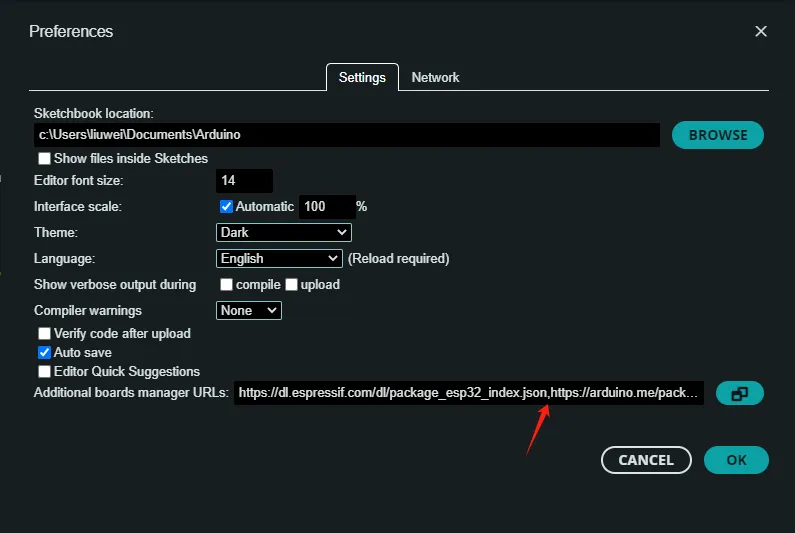
如果需要添加多个开发板 URL,无需删除 ESP32 开发板支持 URL,可将其它 URL 添加到新行,Arduino IDE 会以逗号分隔显示。例如同时添加 ESP8266 开发板 URL 时,显示内容如下:
https://dl.espressif.com/dl/package_esp32_index.json, http://arduino.esp8266.com/stable/package_esp8266com_index.json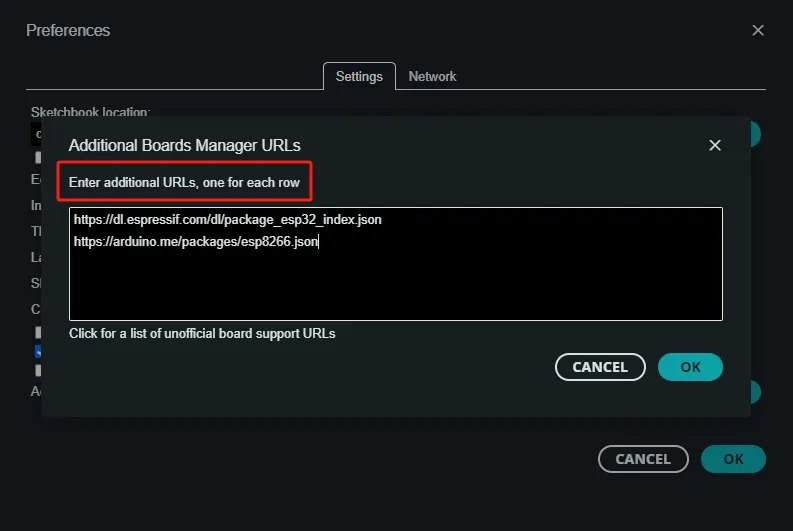
-
下载 RoArm-M3 下位机开源程序,下载后解压缩。在"我的电脑"中输入以下路径:
C:\Users\username\AppData\Local\Arduino15将
username替换为电脑中的账户名。新建packages文件夹,将解压后的esp32开发包复制到packages文件夹下。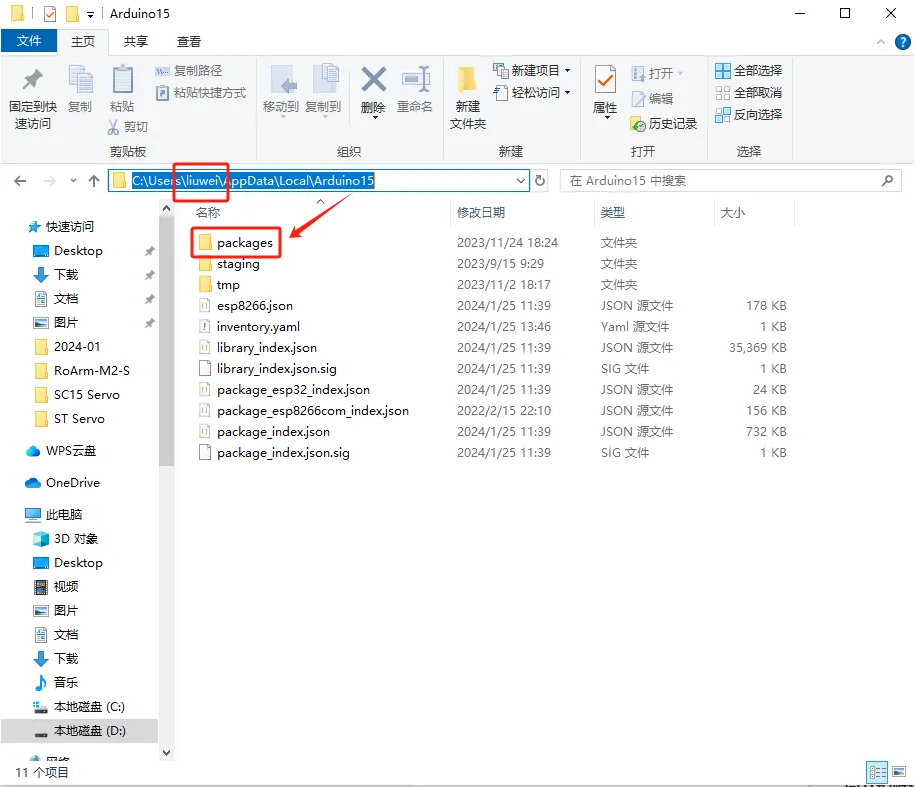
从
packages\esp32\hardware\esp32路径可查看已安装的 ESP32 开发板版本。RoArm-M3-S 开源程序使用的 ESP32 开发板版本为 3.0.7。
3. 依赖库安装
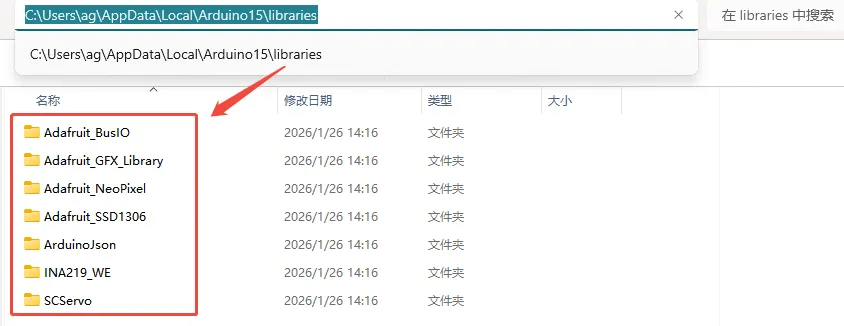
从产品资料包或随程序包提供的文件中获取依赖库文件,下载后解压缩。打开 Arduino IDE 默认库路径,再将图中的文件夹复制到 libraries 文件夹中。
C:\Users\username\AppData\Local\Arduino15\libraries
其中 username 需要替换为电脑中的账户名,路径也可按 Arduino IDE 实际安装位置调整。
4. 上传程序
-
下载 RoArm-M3 下位机开源程序,解压后双击打开
RoArm-M3_example.ino。该目录下的所有文件需要放在同一个文件夹下。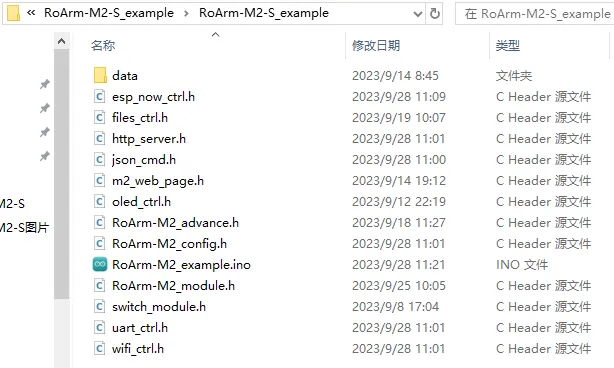
-
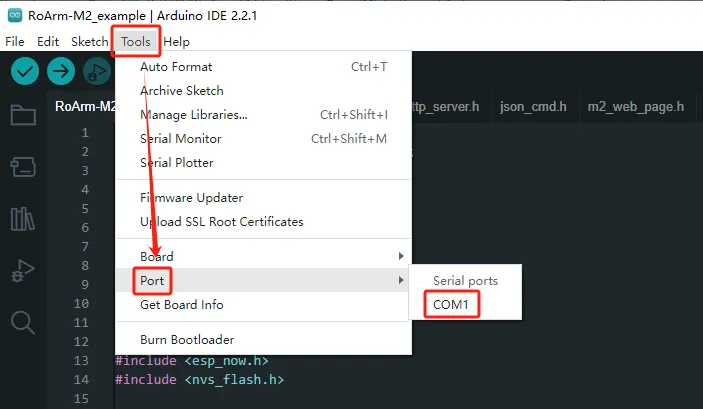
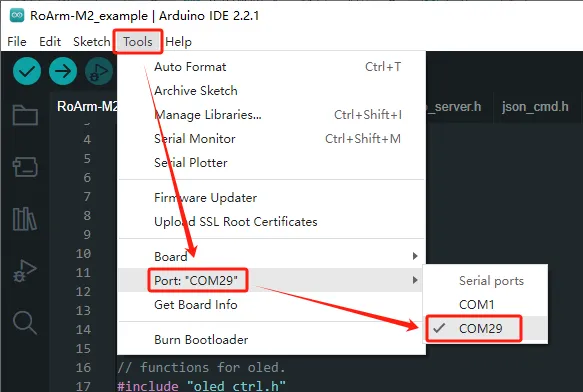
点击"工具"→"端口",记录电脑上已有的 COM 口,此时不要选择该 COM 口。不同电脑显示的已有 COM 口可能不同。
-
用 USB 线连接 RoArm-M3-S 机械臂驱动板和计算机。USB 线需要连接驱动板左侧 USB 接口。点击"工具"→"端口",再选择新出现的 COM 口。
-
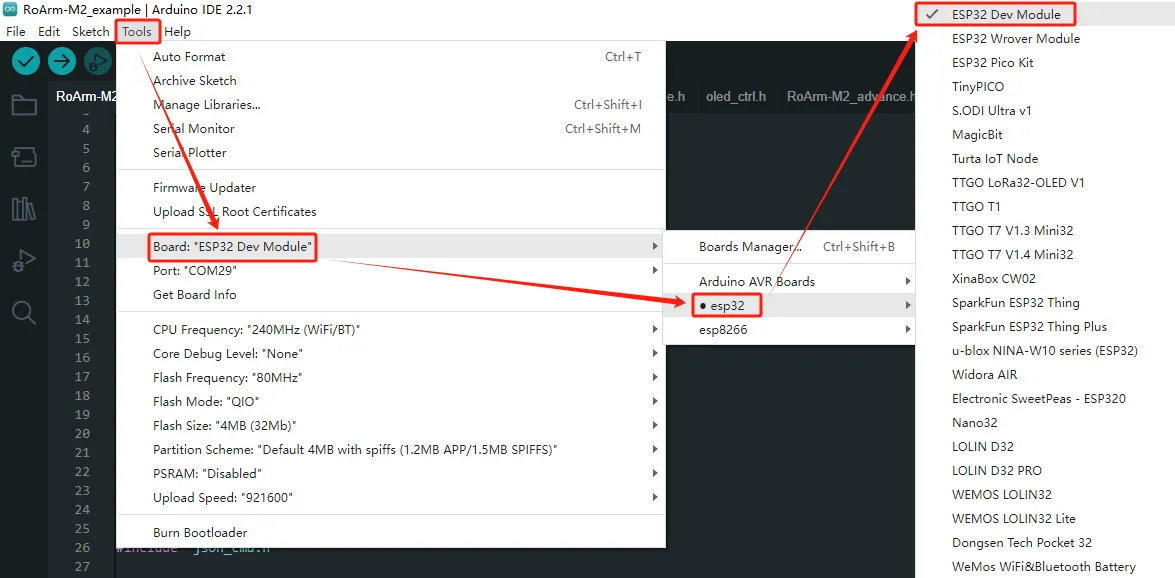
在 Arduino IDE 中,点击"工具"→"开发板"→"ESP32"→"ESP32 Dev Module"。
-
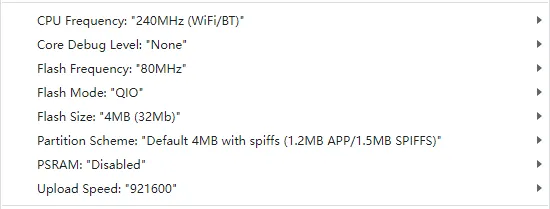
点击"工具",按下图设置其它选项。其中 Partition Scheme 选择 Huge APP,PSRAM 选择 Enabled。
-
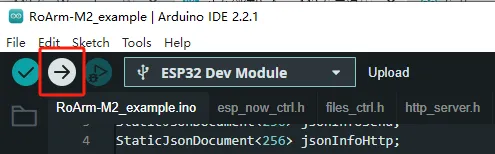
设置全部完成后,点击"上传"将程序上传至机械臂的驱动板上。
如果上传期间遇到问题,需要重新安装或更换 Arduino IDE 版本,可先卸载 Arduino IDE。卸载软件后,手动删除以下文件夹中的内容:
C:\Users\username\AppData\Local\Arduino15部分隐藏文件需要先在文件资源管理器中开启显示,再重新下载安装 Arduino IDE。