Servo Driver with ESP32
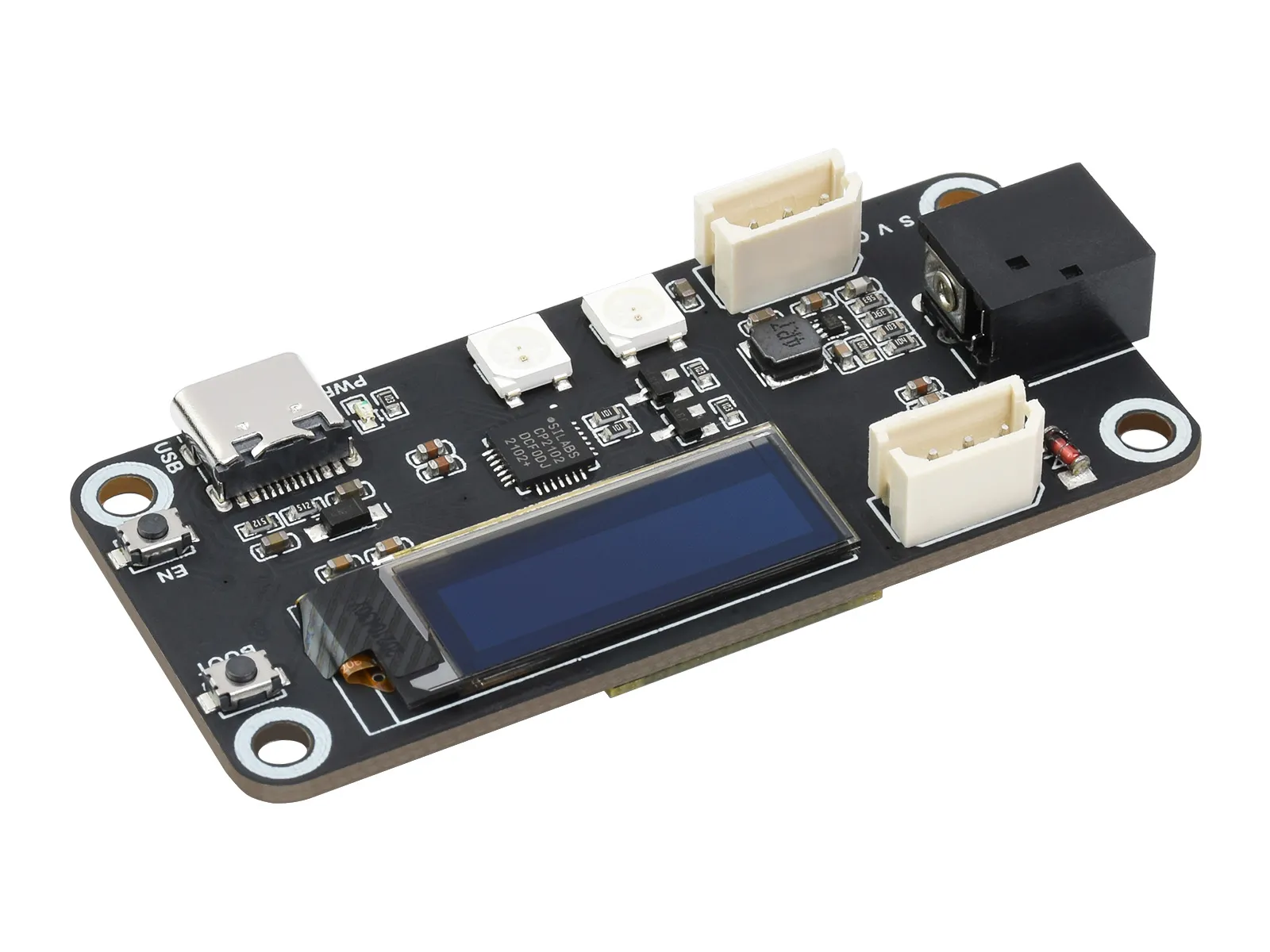
本产品是基于 ESP32 的总线舵机控制板,可通过 Web 端控制总线舵机,并支持修改舵机 ID 和工作模式(舵机模式 / 电机模式)。
在供电满足舵机负载需求的前提下,理论上可控制最多 253 个总线舵机,并读取每个舵机的当前角度、负载、电压、模式等信息。驱动板支持通过串口与上位机通信,板载 OLED 屏幕可显示关键信息。
本产品适用于机械手臂、六足机器人、人形机器人、轮式机器人等需要读取舵机角度和负载信息的机器人项目。
产品规格
- 输入电压 VIN:6 ~ 12 V(输入电压需要与舵机电压匹配)
- 主控芯片:ESP32
- 控制方式:UART
- 下载接口:Type-C
- 供电接口:5.5 × 2.1 mm DC
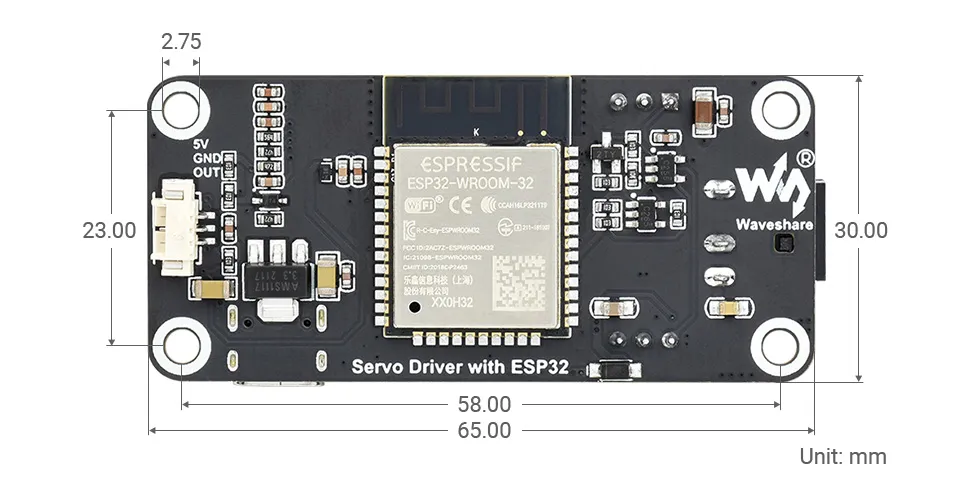
- 产品尺寸:65 mm × 30 mm
- 固定孔通径:2.75 mm
- 定位孔间距:58 mm × 23 mm
产品特性
- 舵机控制:在供电满足舵机负载需求的前提下,可控制最多 253 个 SC/ST 系列总线舵机。
- 输入电压:支持 6 ~ 12 V 输入,输入电压需与所连接舵机的工作电压一致。
- 无线通信:板载 WiFi 和蓝牙模块,示例程序支持 Web 端控制,并提供 ESP-NOW 通信功能。
- 程序下载:板载自动下载电路,可通过 Type-C 接口上传程序。
- 开源资料:提供 Web 应用示例程序和机器人结构文件,可用于二次开发。
- 结构尺寸:迷你小巧,节省空间,适用于安装空间有限的机器人结构。
资源简介
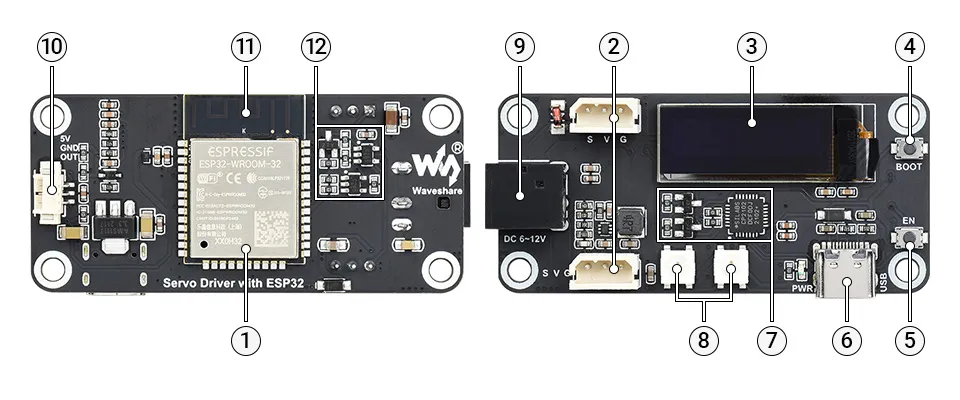
- ① ESP32 主控
- ② 总线舵机控制接口
- ③ OLED 屏幕
- ④ BOOT 手动下载模式按键
- ⑤ 复位按键
- ⑥ TYPE-C 接口
- ⑦ 自动下载电路
- ⑧ RGB-LED 指示灯
- ⑨ 5.5 × 2.1 DC 供电接口
- ⑩ RGB-LED 扩展接口
- ⑪ 板载天线
- ⑫ 总线舵机控制电路
产品尺寸
开源项目
您可以在产品资料中下载相关的开源机器人模型,用于搭建自己的项目。

客户案例:Rebelia 机器人手
使用产品:
项目简介: Rebelia Robotic Hand 是由来自 Hackday 社区的创客开发的开源仿生机械手项目。使用我们提供的伺服驱动系统与总线舵机,实现了灵活的手指弯曲动作。
项目地址:Hackaday 地址