产品使用
Servo Driver with ESP32 板载的初始程序是适用于我们的 SC 系列舵机的程序。
如果您使用的是 SC 系列舵机,在驱动板上连接舵机并接入合适的电源后,就可以连接驱动板的 WiFi,在 Web 端控制舵机。详见本页面的 Web 端使用教程。
如果您使用的是我们的 ST 系列舵机,则需要先烧录适用于 ST 系列舵机的程序,才能在 Web 端控制舵机。
本驱动板可适配 ST、SC 系列总线舵机,分别提供专用烧录程序,无需安装 Arduino IDE 及各类依赖库,通过专属 ESP32 下载工具即可完成程序烧录;烧录完成后可通过 Web 端实现舵机 ID 配置、模式切换、运动控制等操作,以下为 ST、SC 系列舵机的程序烧录步骤和 Web 端使用教程。
1. 程序烧录
1.1 ST 系列舵机
点击下载 ST 系列舵机专属 ESP32 下载工具,解压后双击打开 “flash_download_tool_3.9.5.exe”。此时会弹出两个窗口,一个是黑色的终端窗口,用于显示下载工具的工作状态;另一个是下载工具的主 UI 界面,在此处进行操作即可。
在 “DOWNLOAD TOOL MODE” 界面,ChipType 选择 ESP32,WorkMode 选择 Factory(调用二进制文件自动适配相对路径,无需手动输入),点击 OK 确认。

保持界面中 LockSettings 勾选状态(支持最多同时给 8 块驱动板烧录程序),用 USB 线连接驱动板与计算机,点击界面 COM 选项,选择新识别的 COM 口。BAUD 设置烧录速率,最高支持 921600(速率越高烧录越快)。
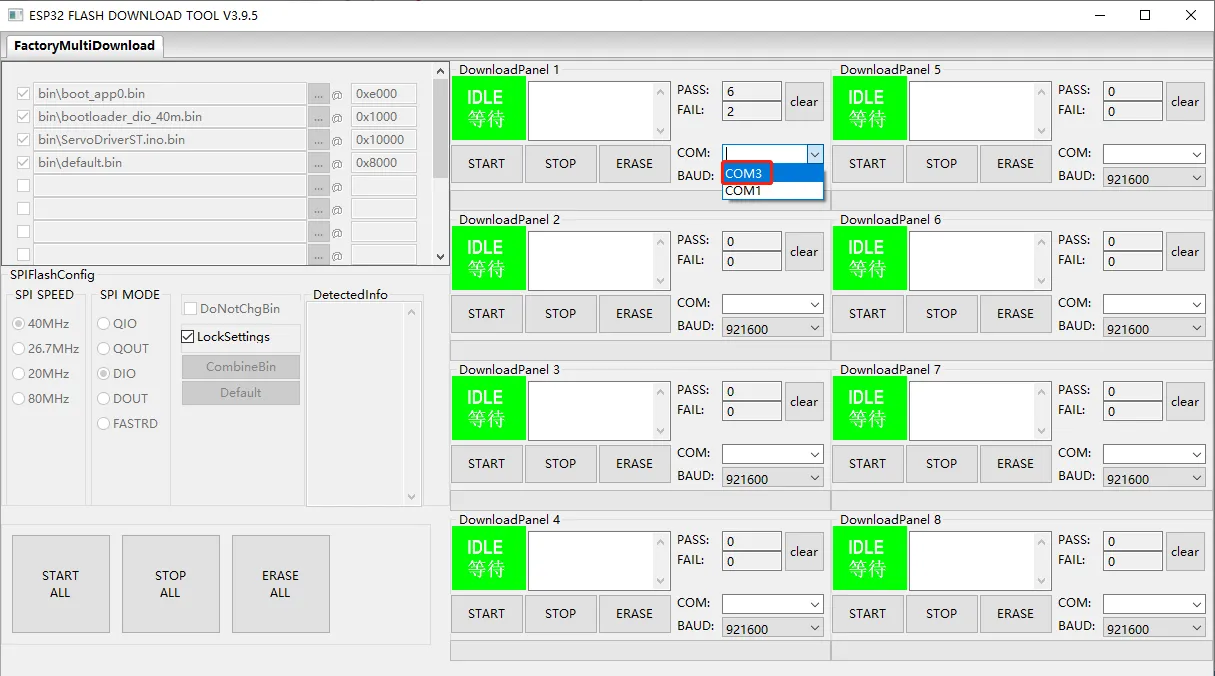
确认配置后点击 START 开始烧录,待界面显示 FINISH 完成即烧录成功。


烧录完成后断开驱动板与电脑的 USB 连接,连接舵机并为驱动板供电,即可开始控制 ST 系列舵机。
1.2 SC 系列舵机
点击下载 SC 系列舵机专属 ESP32 下载工具,接着按照上述 ST 系列舵机的烧录步骤操作即可。烧录完成后连接舵机与驱动板,为驱动板供电即可实现 SC 系列舵机的控制。
2. Web 端使用教程
此处将以 ST 系列舵机示例程序为例,介绍 Web 端界面的使用。
2.1 接入舵机和电源
以 ST3215 Servo 为例,在驱动板上接入舵机后,需要通过舵机驱动板的 5.5 × 2.1 mm DC 接口为其供电 6 ~ 12.6 V(推荐使用 12 V 供电),该供电接口会直接为舵机供电。
Servo Driver with ESP32 能承受的最大电流是 5 A,如果您使用的舵机数量较多,需要分批次供电,以免电流太大烧坏驱动板。
2.2 连接驱动板 WiFi 热点
- 驱动板上电后,会自动创建 WiFi 热点,默认热点名称:ESP32_DEV,默认密码:12345678;
- 用手机或电脑连接该 WiFi。由于该 WiFi 无法访问互联网,部分设备可能会自动切换到其他已保存的 WiFi 网络。若发生此情况,请重新连接 ESP32_DEV WiFi,一般再次连接成功后即可保持稳定连接。
- 建议使用谷歌浏览器,在地址栏输入 192.168.4.1,进入 Web 端控制界面。

2.3 舵机扫描
- 驱动板上电时自动扫描舵机,若舵机在驱动板上电后才连接,点击界面 Start Searching 重新扫描。
- 我们的舵机出厂默认 ID 为 1,若在驱动板上连接多个舵机,需要修改舵机的 ID,确保 ID 不冲突,否则会扫描不到舵机。更改舵机 ID 时,建议仅将需要改 ID 的单个舵机与驱动板连接。
- 驱动板开机默认扫描 ID:0 ~ 20 的舵机,若使用舵机 ID 超过 20,需修改源码 ServoDriverST.ino 文件中的 MAX_ID 数值(最大有效值是 253),重新烧录程序后生效。
- 扫描完成后,界面会显示当前所有已连接的舵机 ID,可进行后续操作。
2.4 核心功能操作
Web 端界面的操作按键功能及使用方法如下,所有操作均针对 Active ID(当前选中的舵机 ID)生效: