MicroPython 开发
本章节包含以下部分,请按需阅读:
MicroPython 入门教程
初次接触 Pico MicroPython 开发,想要快速上手?我们为您准备了一套通用的入门教程。此教程旨在帮助开发者快速熟悉 Thonny IDE 并上手开发。教程内容涵盖环境搭建、项目创建、组件使用及外设编程等,帮助您迈出 MicroPython 编程的第一步。
配置开发环境
请参考 安装和配置 Thonny IDE 教程 下载安装 Thonny IDE。
示例程序
MicroPython 示例程序位于 示例程序包 的 examples\MicroPython 目录中。
| 示例程序 | 基础例程说明 | 依赖库 |
|---|---|---|
| 01_SD | 挂载 SD 卡 | - |
| 02_RTC | 获取 RTC 数据 | - |
| 03_IMU | 获取六轴传感器数据 | - |
| 04_GPS_UART | 使用 UART 与 GPS 模块通讯,获取 GPS 数据 | - |
01_SD
【程序说明】
- 使用 SPI 与 SD 卡通讯,并将 SD 卡挂载到开发板,挂载成功后,可通过 Thonny 查看和修改 SD 卡中的内容。
【硬件连接】
- 插入 SD 卡
- 使用 USB 线把板子接入电脑
【代码分析】
sdcard.SDCard(spi, cs, baudrate):创建 SD 卡对象,并将初始化的 SPI 接口与 CS 引脚绑定到 SD 卡驱动中。uos.mount(sd, '/sd'):将 SD 卡文件系统挂载到/sd目录下。挂载成功后,用户即可通过/sd路径对 SD 卡进行文件读写操作,例如创建、读取或删除文件。
【运行效果】
-
通过 thonny 将
01_SD文件下的所有 py 文件上传到开发板中,并复位。开发板复位后会根据 boot.py 的程序,自动将 SD 挂载到sd目录下。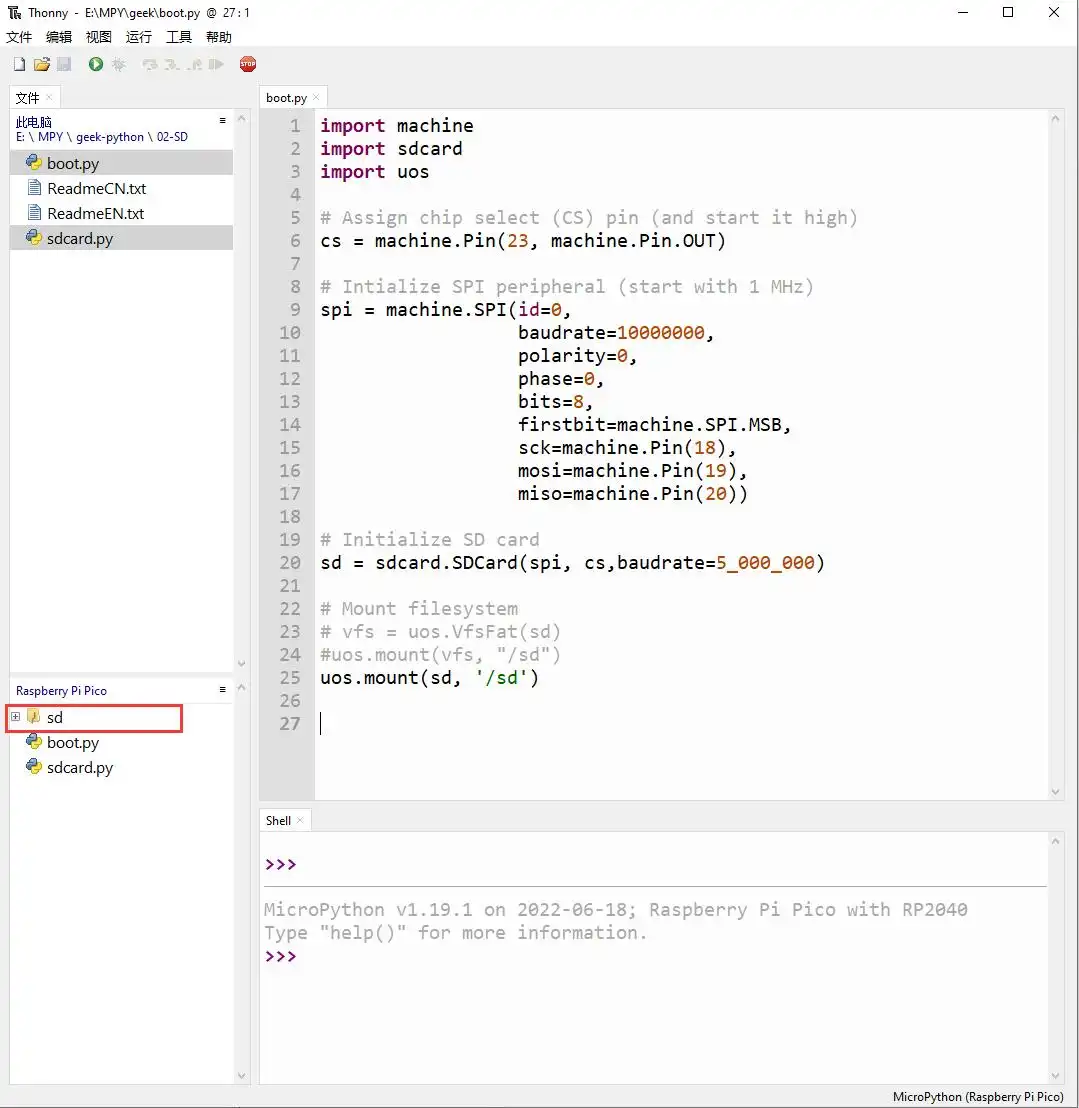
02_RTC
【程序说明】
- 使用 I2C 与 板载 RTC 芯片通讯,设定并读取 RTC 时间数据,同时测试 RTC 中断是否正常。
【硬件连接】
- 使用 USB 线把板子接入电脑
【代码分析】
RTC = PCF85063():创建 RTC 对象。RTC.setDate(weekday, day, month, year):设置 RTC 日期。RTC.setTime(hour, minute, second):设置 RTC 时间。RTC.readTime():读取 RTC 时间。RTC.setAlarm(second, minute, hour, day, weekday):设置 RTC 闹钟。RTC.enableAlarm():使能 RTC 闹钟。
【运行效果】
-
使用 thonny 运行
02_RTC文件下的 py 文件。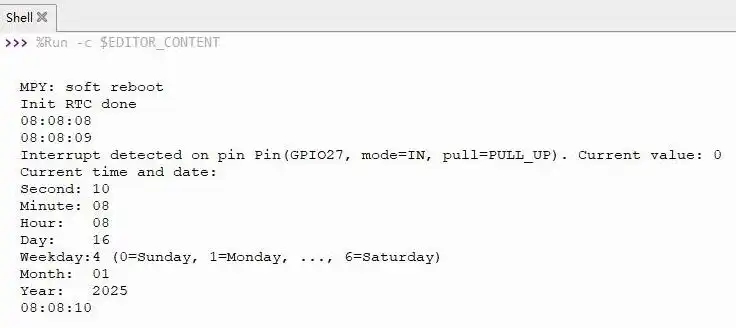
03_IMU
【程序说明】
- 使用 I2C 与 板载六轴传感器通讯,读取六轴传感器数据。
【硬件连接】
- 使用 USB 线把板子接入电脑
【代码分析】
IMU = QMI8658():创建 IMU 对象。IMU.Read_XYZ():读取六轴传感器数据。
【运行效果】
-
使用 thonny 运行
03_IMU文件下的 py 文件。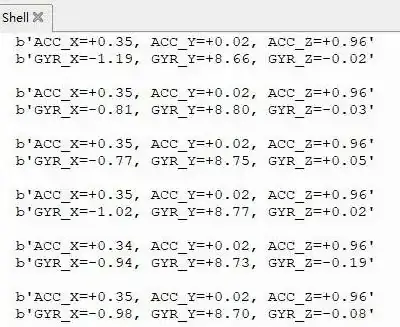
04_GPS_UART
【程序说明】
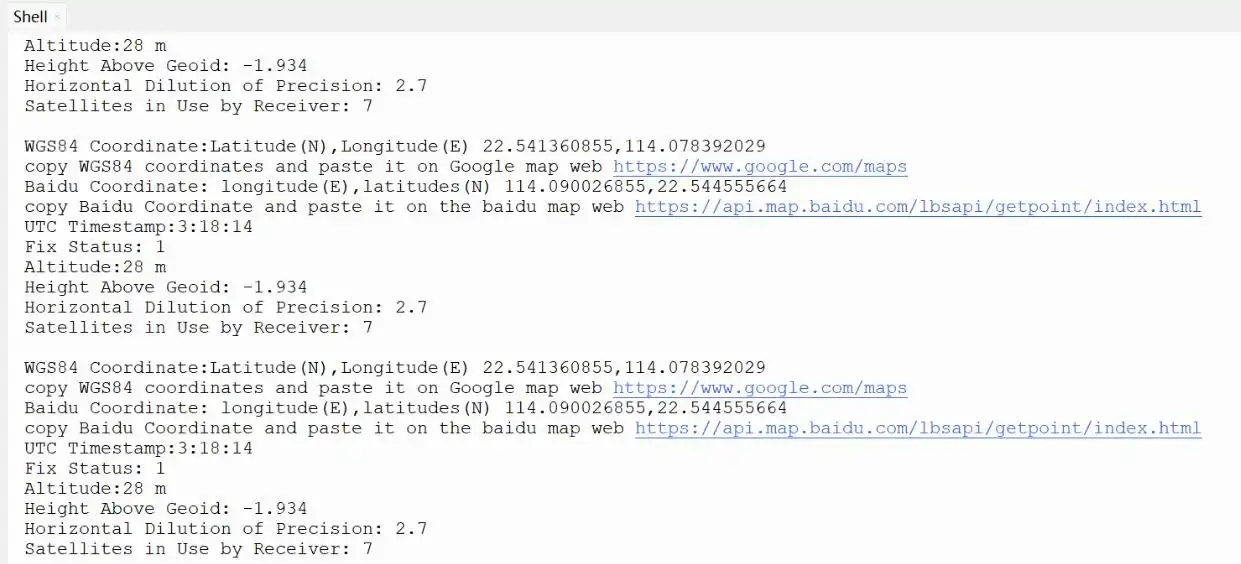
- 使用 UART 与 板载 GPS 通讯,查询 LC76G 的 NMEA 数据。
【硬件连接】
- 连接 GNSS 陶瓷天线
- 使用 USB 线把板子接入电脑
【代码分析】
gnss_l76b=l76x.L76X():创建 GPS 对象。gnss_l76b.l76x_send_command():发送初始化指令。gnss_l76b.uart_any():判断串口是否有数据。gnss_l76b.uart_receive_byte():接收串口数据。
【运行效果】
-
使用 thonny 将
04_GPS_UART下所有目录和文件上传到开发板,运行 example 文件下的 coordinates_converted.py 文件。