HexArth

HexArth 是一款具有 18 个自由度的仿生六足机器人,配备了 18 个 30kg.cm 大扭矩舵机,结构可靠动作灵活,具有 9 轴运动跟踪器,并开源了可跨平台使用的 Web 应用来控制该机器人,手机或电脑只需要安装有浏览器即可访问该机器人的控制界面。以 ESP32 作为下位机进行连杆逆解和步态生成,为上位机分担算力,也可以安装树莓派作为上位机来进行高阶决策运算。
| SKU | 产品 |
|---|---|
| 33977 | HexArth |
产品特性
- 18 个自由度,动作更加灵活丰富。
- ICM20948 9 轴运动跟踪器,可使用自平衡模式。
- 30kg.cm 大扭矩舵机,堵转扭矩高达 30kg.cm,可扩展性更强。
- 结构件由 5052 铝合金和 PA12 尼龙件组成,结构坚固可靠。
- 集成多种交互设备,包括 0.96inch OLED 屏幕、两颗 RGB-LED 指示灯等。
- 例程代码使用 Arduino IDE 开发,不需要手动配置编译环境,ESP32 开机自动建立 WIFI 热点,可使用手机(Android/iOS)或电脑(Linux/Windows/Mac)连接并登录到控制页面,只需安装基于 Chromium 的浏览器即可,不需要下载 app。
- 带有充电接口和自动下载电路,你可以边充电边使用。
- 六节 18650 电池,4000mAh 大容量,输出电流更大,舵机动力更强。
- 电池保护电路,具有防过充、防过放、防过流和短路保护功能。
- 板载 INA219 采集芯片,方便实时监控电池电压,充电电流。
- 可以安装树莓派作为上位机通过串口与下位机通信,ESP32 作为下位机可以分担很多逆解和步态生成的算力,留给树莓派更多的资源用于高阶功能开发。
- 开源 step 模型,方便进行二次开发;
- 绝大部分配置设置可由 JSON 指令实现,例如不需要连接 USB 线即可为产品配置 WIFI 连接。
- 全部代码开源并提供丰富的开发文档和教程。
产品硬件介绍
下位机驱动板板载接口
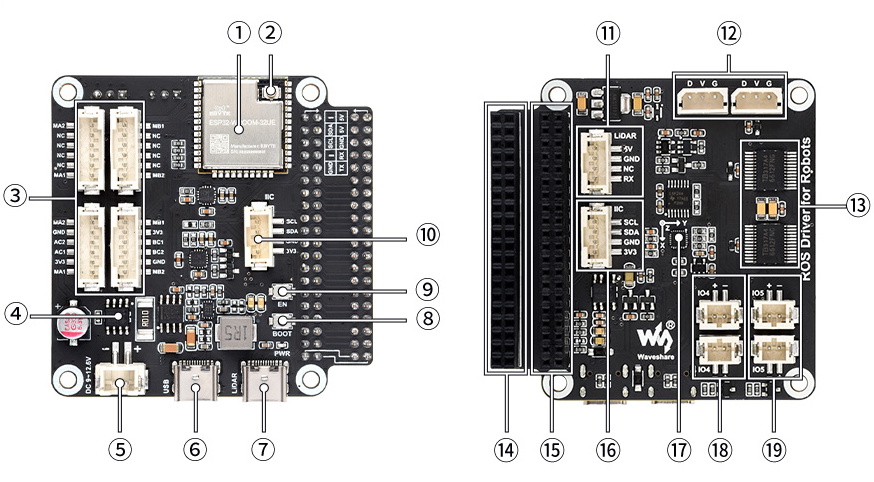
- 下位机主控模组 ESP32
- 下位机天线接口
- 电机控制接口
- INA29(电池电压检测 IC)
- 供电接口
- USB 通信/下载接口
- 雷达 USB 接口
- ESP32-IO0 按键
- ESP32-EN 按键
- I2C 设备接口
- 雷达串口接口
- 总线舵机控制接口
- TB6612FNC(电机驱动 IC)
- 上位机 40 PIN 扩展接口
- 上位机连接接口
- I2C 设备接口
- ICM20948(9 轴 IMU 姿态传感器)
- 由 ESP32-IO4 控制的 12v 开关接口
- 由 ESP32-IO5 控制的 12v 开关接口
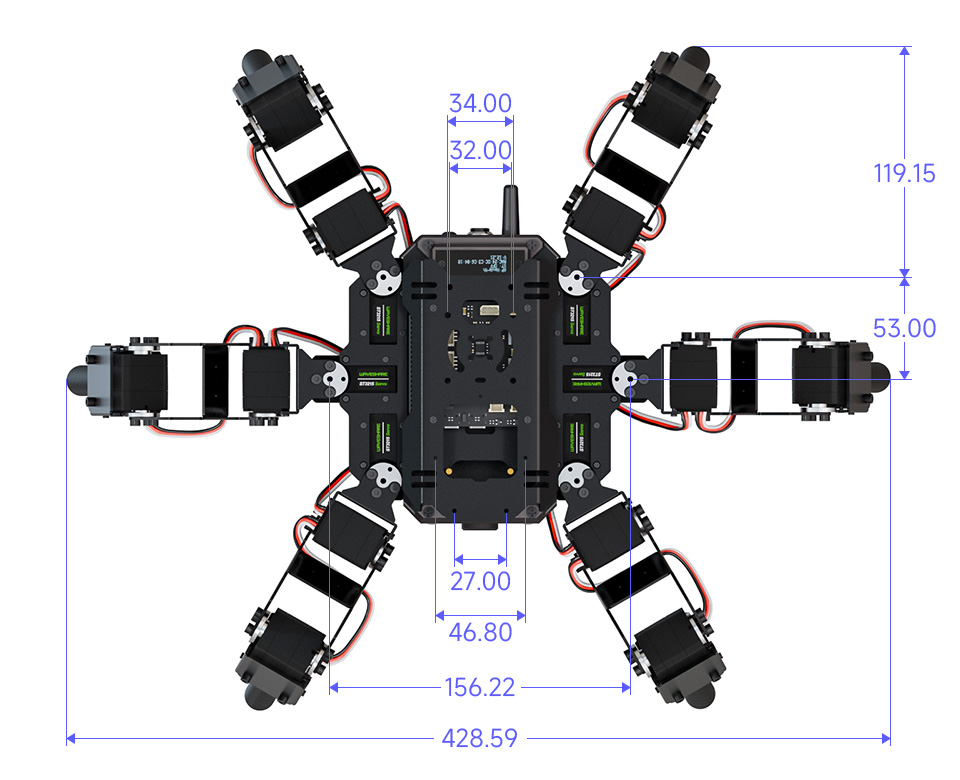
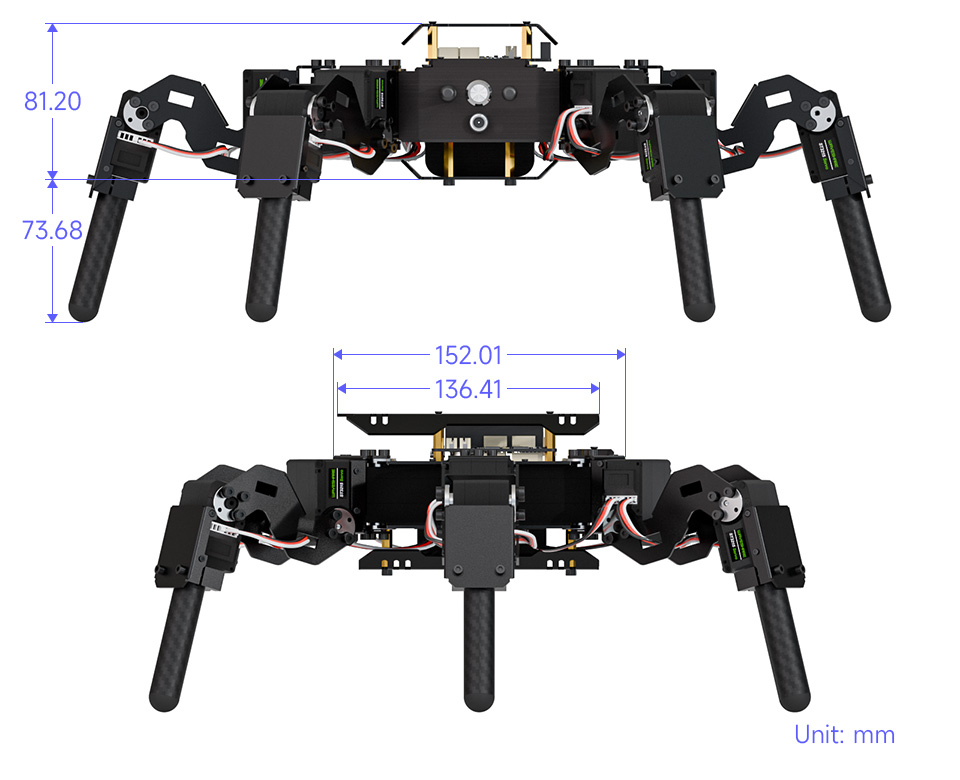
产品尺寸