Raspberry Pi 使用说明
此小结以 Raspberry Pi + 2 个 Q43 为例进行测试说明:一个设置为基站模式,另一个设置为流动站模式,同时测试地磁传感器实现电子罗盘应用。Linux 系统整体操作差异不大,也可适配 Jetson、RDK 等常见 Linux 主板。建议在空旷、晴朗 ☀️、户外可视天空环境下测试:越空旷、天气越好 ☀️,RTK 定位越稳定、越精准。
环境配置
-
通过 GH1.25 线将 Q43 模块接入树莓派的 UART0 和 I2C1 引脚,其中 UART 接到 RTK 定位模组,I2C 接到 IST8310 地磁传感器。硬件连接如下图:

-
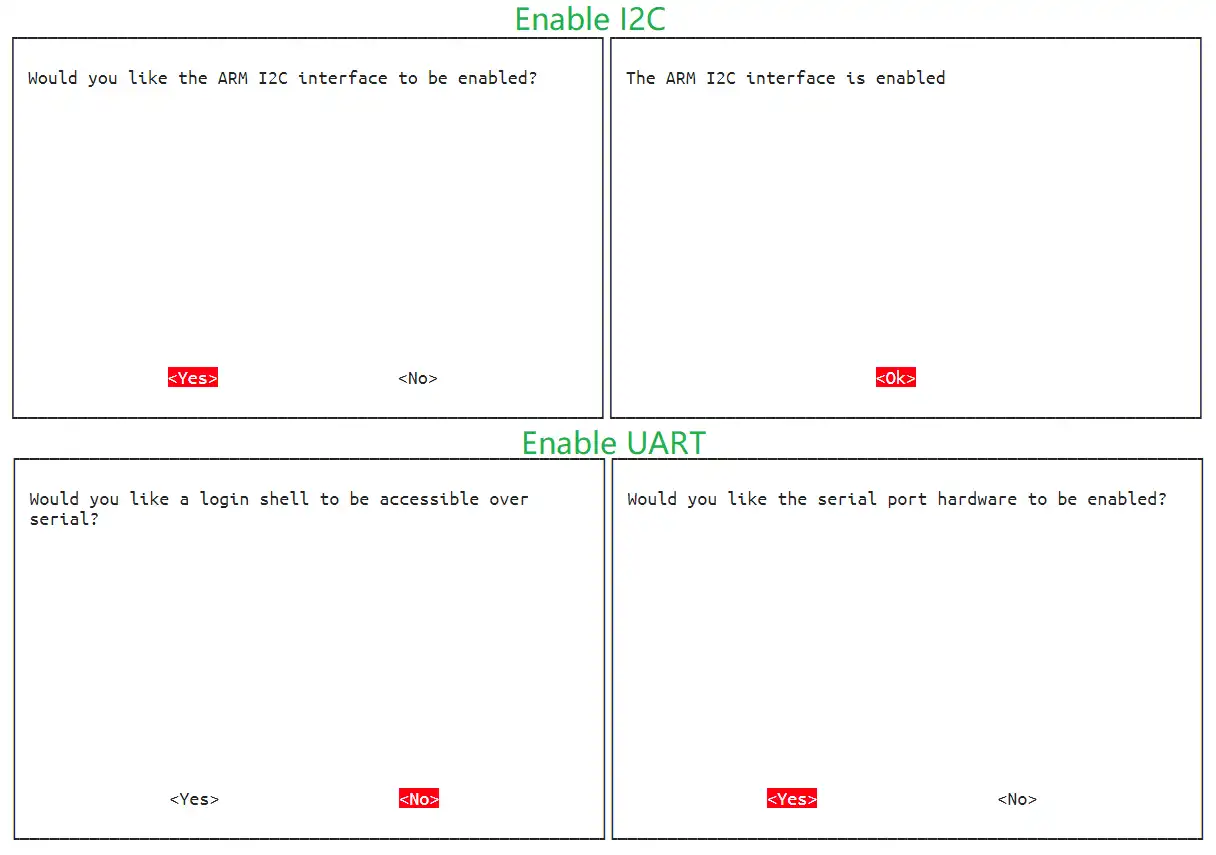
打开树莓派的 I2C 和 UART 接口:UART 设置中先选择 NO 关掉 shell 调试串口,再选择 YES 打开 UART 串口,如下图所示:
RTK Base
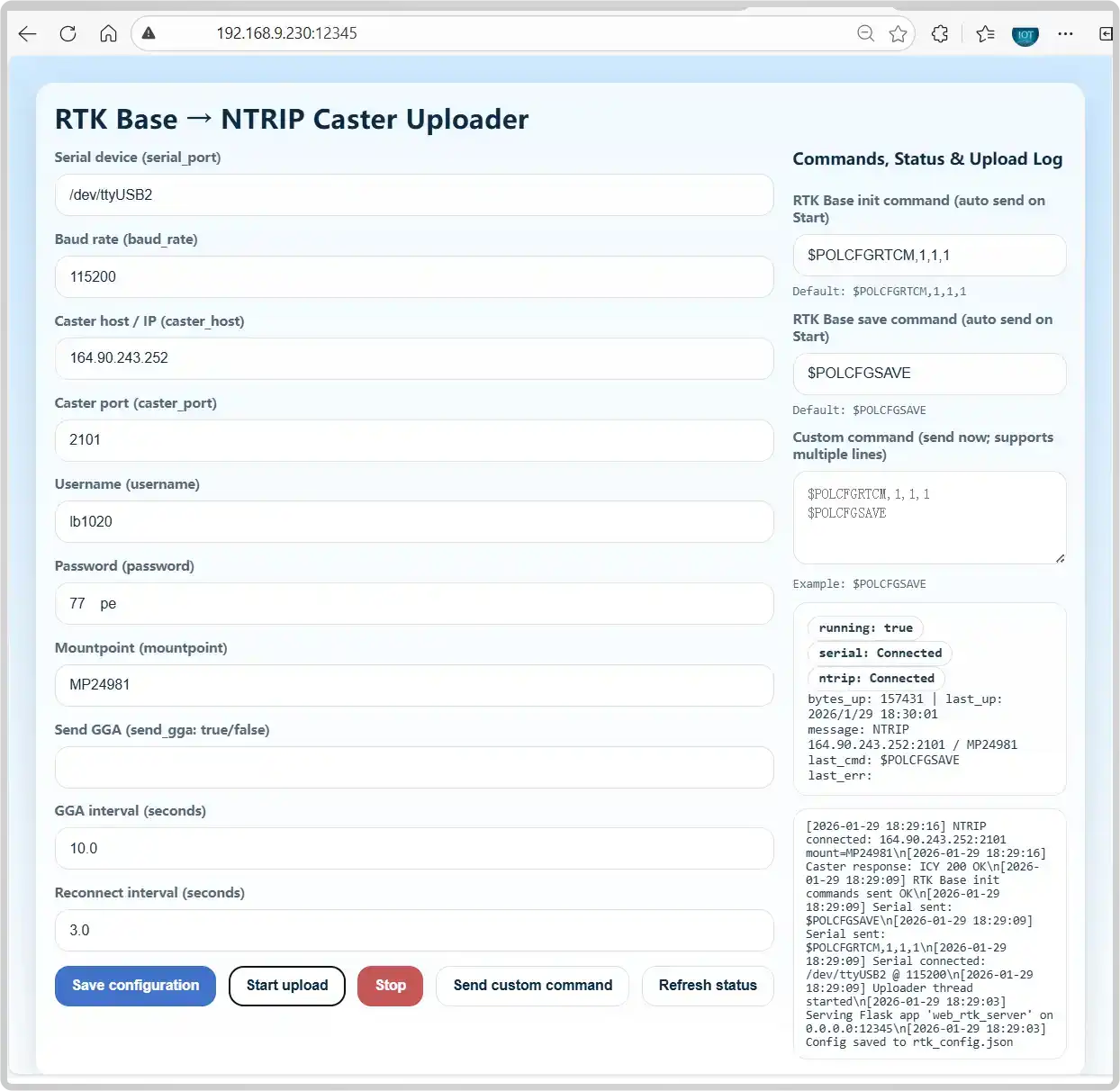
在树莓派终端下载并运行 Python 3 程序;然后在浏览器输入程序生成的 IP + 端口号,即可打开 NTRIP Server 网页界面。默认是 115200 波特率、串口 ttyAMA0 和 Caster Emlid 的预配置参数,可根据实际情况自定义:
pip3 install flask pyserial
wget https://files.waveshare.com/wiki/Q43-GNSS-Helical-RTK-Module/Demo/Q43-GNSS-Helical-RTK-Module.zip
sudo unzip Q43-GNSS-Helical-RTK-Module.zip
cd Q43-GNSS-Helical-RTK-Module/Raspberry-Pi/Python
sudo python3 RTK-Base.py
RTK Rover
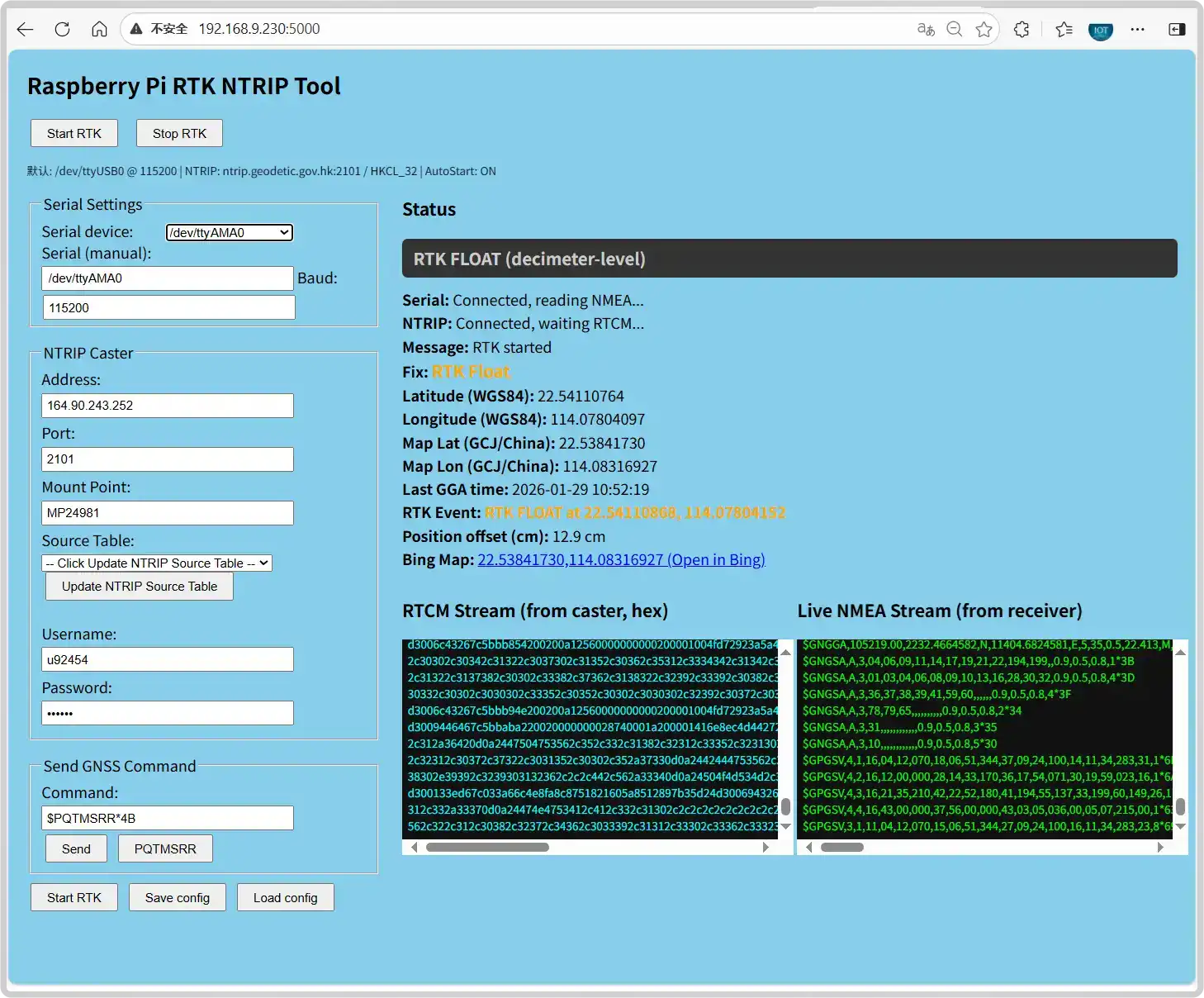
在树莓派新开一个终端运行 Python 3 程序;然后在浏览器输入程序生成的 IP + 端口号,即可打开 NTRIP Client 网页界面。请根据实际 Caster 的参数填写,实现 RTK 精准定位:
sudo python3 RTK-Rover.py
电子罗盘
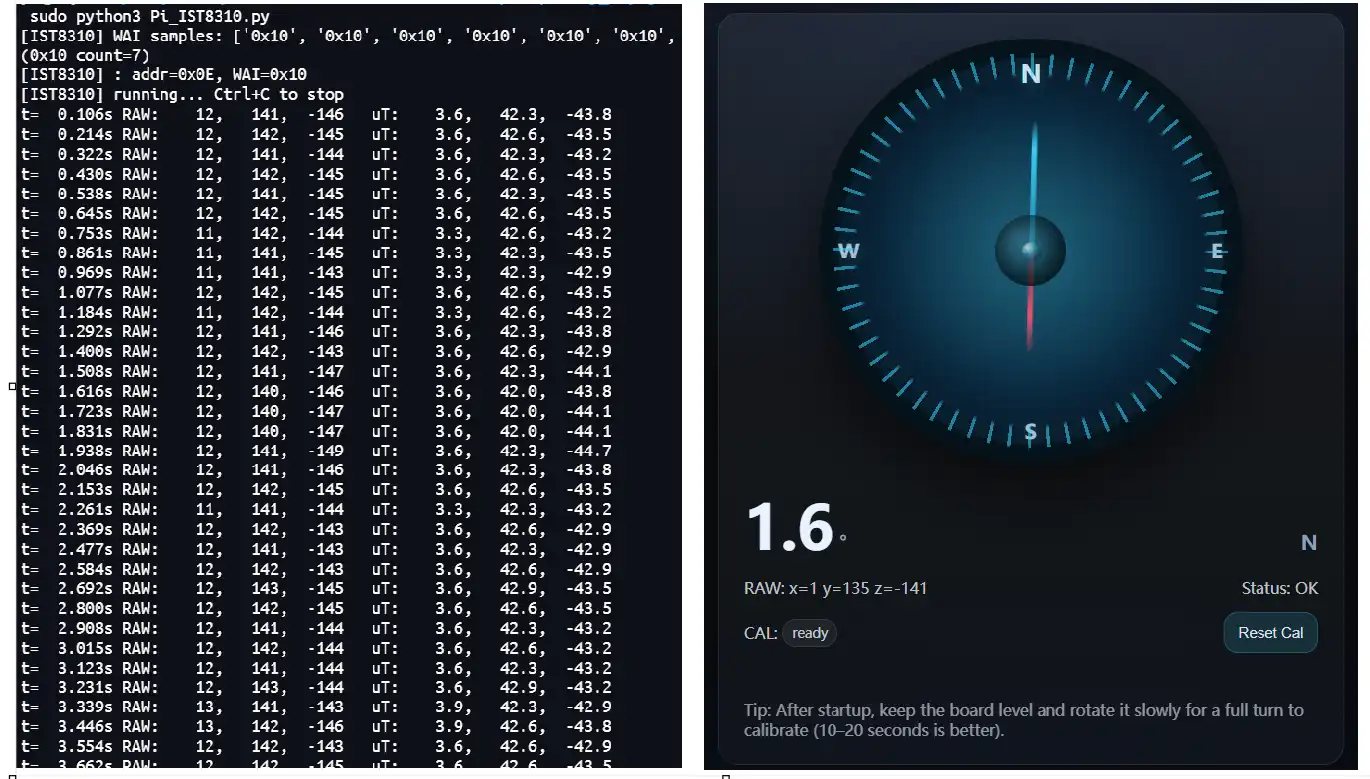
模块板载 IST8310 地磁传感器,可以通过 I2C 驱动实现电子罗盘应用,在树莓派上运行以下程序:
sudo python3 Pi-IST8310.py
sudo python3 Compass-IST8310.py
运行程序后,可以获取环境磁场强度以及电子指南针般的体验: