ESP-IDF 开发
本章节包含以下内容,请按需阅读:
ESP-IDF 入门教程
初次接触 ESP32 ESP-IDF 开发,想要快速上手?我们为您准备了一套通用的 入门教程。
- 第0节 认识 ESP32
- 第1节 搭建环境
- 第2节 运行实例
- 第3节 创建项目
- 第4节 使用组件
- 第5节 调试程序
- 第6节 FreeRTOS
- 第7节 驱动外设
- 第8节 Wi-Fi 编程
- 第9节 BLE 编程
请注意:该教程使用 ESP32-S3-Zero 作为教学示例,所有硬件代码均基于其引脚布局。在动手实践前,建议您对照手中的开发板引脚图,确认引脚配置无误。
配置开发环境
以下内容以 Windows 系统为例,使用 VS Code + ESP-IDF 扩展 的方式进行开发。Mac/Linux 用户请参考 官方说明。
此部分图示以安装 ESP-IDF V5.5.2 为例示范,安装时请选用与您开发板示例匹配的 ESP-IDF 版本。
安装 ESP-IDF 开发环境
-
前往 ESP-IDF Installation Manager 下载 ESP-IDF 安装管理器。这是乐鑫最新推出的跨平台安装工具,下文将演示如何使用其离线安装功能。
在页面中点击 Offline Installer 标签,然后在筛选栏中选择 Windows 操作系统和你需要的 ESP-IDF 版本(图示仅为参考,请以实际为准)。
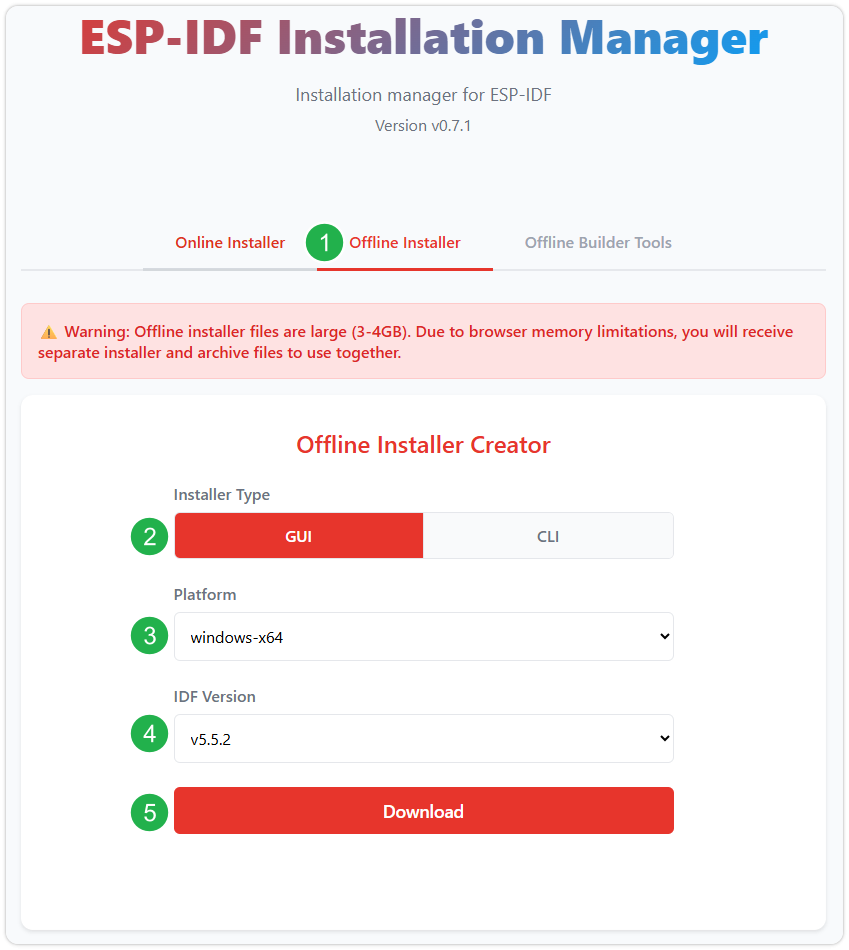
确认选择无误后,点击下载按钮。浏览器将自动同时下载两个文件:一个是 ESP-IDF 离线整合包(.zst),另一个是 ESP-IDF 安装器(.exe)。
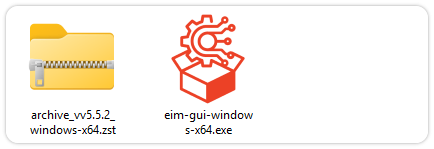
请耐心等待两个文件下载完成。
-
下载完成后,双击运行 ESP-IDF 安装器(eim-gui-windows-x64.exe)。
启动后,可在右上角将界面语言切换为中文。
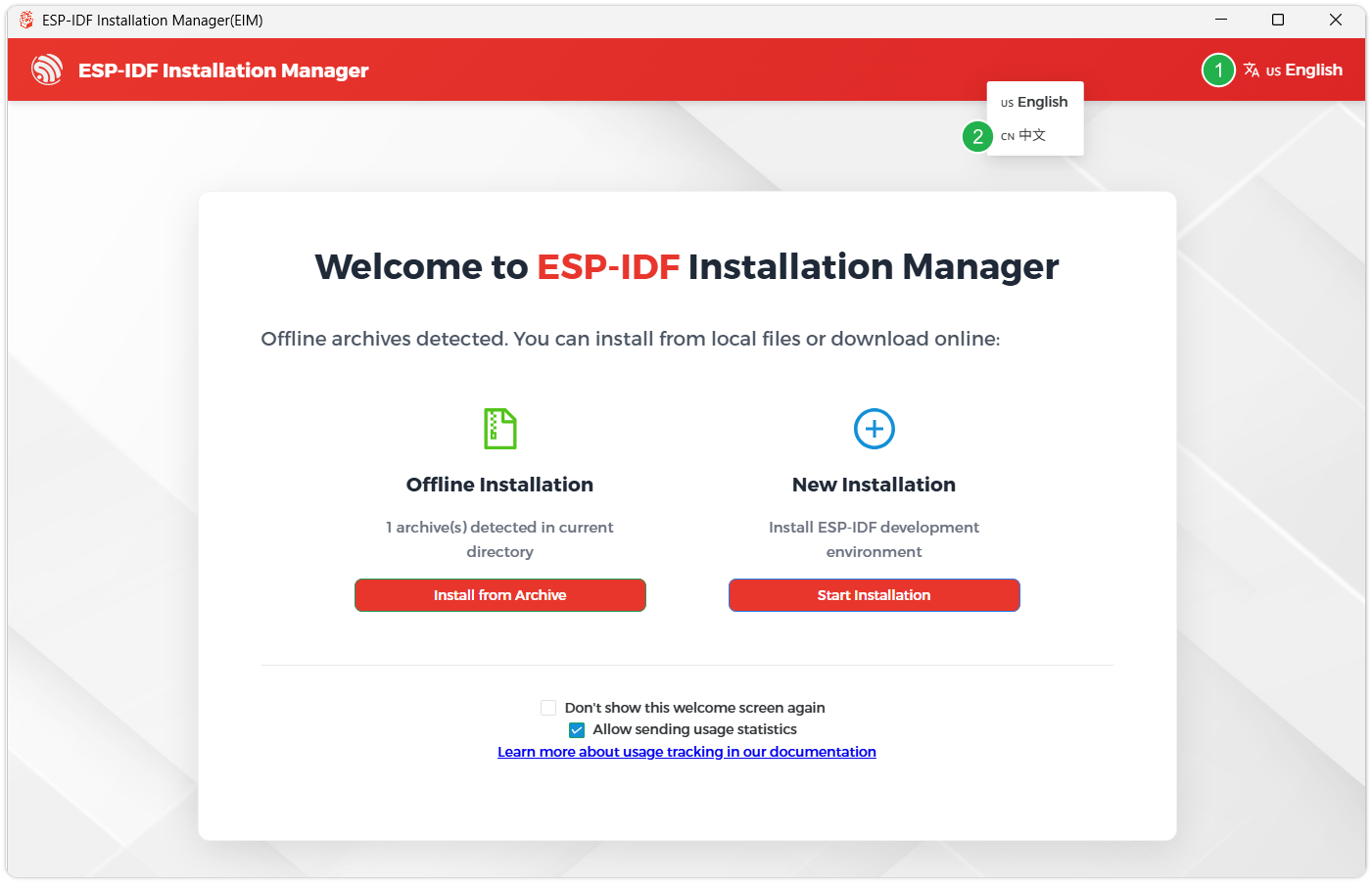
安装工具会自动检测同一目录下是否存在离线整合包。点击 从存档安装。

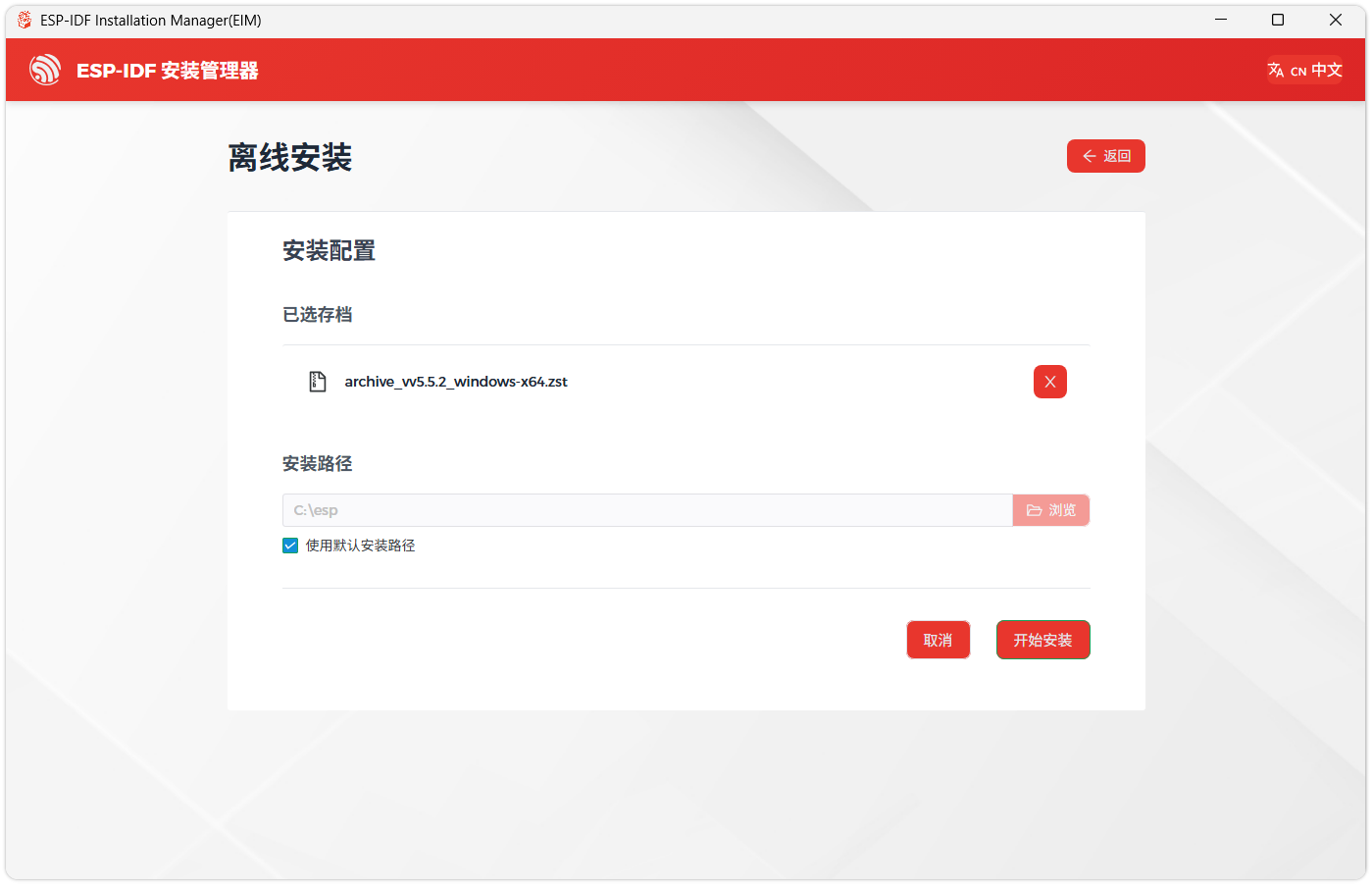
接下来,选择安装路径。建议使用默认路径;若需自定义,请确保路径中不包含中文或空格。确认无误后,点击 开始安装。
-
当看到如下界面时,表示 ESP-IDF 已安装成功。

-
建议同时安装驱动程序。点击 完成安装,然后点击 安装驱动程序。

安装 Visual Studio Code 与 ESP-IDF 扩展
-
下载并安装 Visual Studio Code。
-
安装时建议勾选 通过 Code 打开操作添加到 Windows 资源管理器文件上下文菜单,以便快速打开项目文件夹。
-
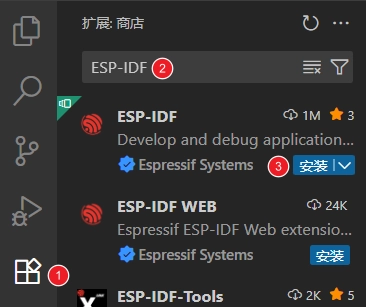
在 VS Code 中,点击侧边活动栏中的
 扩展图标(或使用快捷键 Ctrl + Shift + X)打开 扩展 视图。
扩展图标(或使用快捷键 Ctrl + Shift + X)打开 扩展 视图。 -
在搜索框中输入 ESP-IDF,找到 ESP-IDF 扩展并点击安装。
-
当 ESP-IDF 扩展版本 ≥ 2.0 时,扩展会自动检测并识别上述步骤中安装的 ESP-IDF 环境,无需手动配置。
示例程序
ESP-IDF 示例程序位于 示例程序包 的 ESP-IDF 目录中。
| 示例程序 | 基础例程说明 |
|---|---|
| 01_AXP2101 | 通过移植后的 XPowersLib 驱动 AXP2101 获取电源相关数据 |
| 02_PCF85063 | 驱动 pcf85063 进行时间存储读取功能 |
| 03_esp-brookesia | 展示完整手机风格 UI 系统,包含状态栏、导航栏、应用启动器和手势交互等组件 |
| 03_QMI8658 | 通过移植后的 SensorLib 驱动 qmi8658 获取陀螺仪相关数据 |
| 05_LVGL_WITH_RAM | 通过开启双缓存、开启 DMA 加速防撕裂等方式运行 LVGL 的 demo |
01_AXP2101
程序说明
- 本示例演示了在使用 ESP-IDF 移植 XPowersLib,通过移植后的 XPowersLib 驱动 AXP2101 获取电源相关数据
硬件连接
- 将开发板接入电脑
代码分析
- i2c_init:初始化 I2C 主设备,为与其他设备(如 PMU)进行通信做准备
- 配置 I2C 参数,包括设置主设备模式、指定 SDA 和 SCL 引脚、启用上拉电阻以及确定时钟频率
- 安装 I2C 驱动,将配置应用到实际的硬件上
- pmu_register_read:从 PMU 的特定寄存器读取一系列字节数据
- 进行参数检查,确保传入的参数有效,避免无效的读取操作
- 分两步进行 I2C 操作,先发送要读取的寄存器地址,然后读取数据。在读取过程中,根据要读取的字节长度进行不同的处理,确保数据的准确读取。同时,处理 I2C 通信过程中的错误情况,返回相应的状态码以便上层代码判断读取是否成功
运行效果
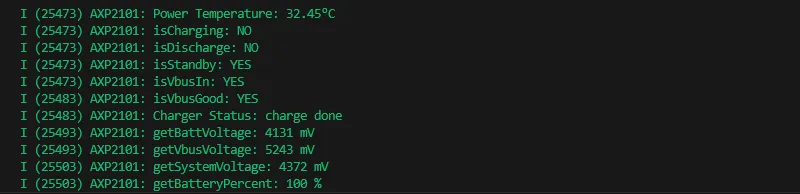
- 此示例不会点亮屏幕
- 串口监视器显示参数:芯片温度,是否正在充电,是否放电,是否待机状态,Vbus 是否连接,Vbus 是否良好,充电器状态,电池电压,Vbus 电压,系统电压,电池百分比
02_PCF85063
程序说明
- 本示例使用简单的方式驱动 pcf85063 进行时间存储读取功能
硬件连接
- 将开发板接入电脑
代码分析
- i2c_master_init
- 定义 I2C 配置结构体 conf,设置主设备模式、SDA 和 SCL 引脚、上拉电阻以及时钟频率
- 使用 i2c_param_config 函数配置 I2C 参数。如果配置失败,记录错误日志并返回错误码
- 使用 i2c_driver_install 函数安装 I2C 驱动,将配置应用到实际硬件上,并返回结果
- rtc_get_time
- 定义一个长度为 7 的字节数组 data 用于存储读取的时间数据
- 调用 rtc_read_reg 函数从 RTC 芯片的特定寄存器地址(0x04)开始读取 7 个字节的时间数据。如果读取失败,记录错误日志并返回错误码
- 对读取到的时间数据进行处理,分别提取秒、分、时、日、星期、月和年的信息,并进行 BCD 到十进制的转换
- 使用 ESP_LOGI 输出格式化的当前时间
运行效果
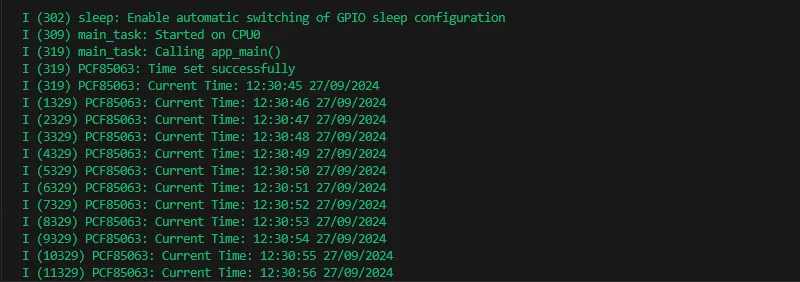
- 此示例不会点亮屏幕
- 串口监视器打印时间信息
03_esp-brookesia
程序说明
- 本示例展示完整手机风格 UI 系统,包含状态栏、导航栏、应用启动器和手势交互等组件。
硬件连接
- 将开发板接入电脑
运行效果
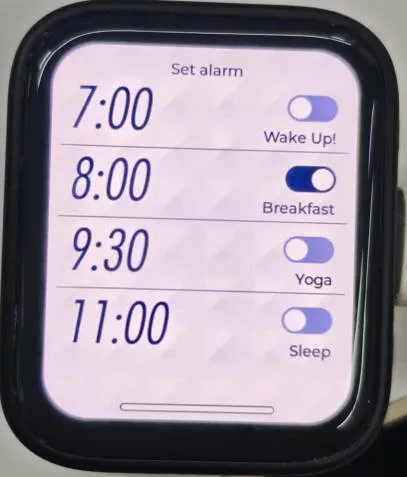 |  |  |
|---|
04_QMI8658
程序说明
- 本示例演示了在使用 ESP-IDF 移植 SensorLib,通过移植后的 SensorLib 驱动 qmi8658 获取陀螺仪相关数据
硬件连接
- 将开发板接入电脑
代码分析
- setup_sensor:设置和初始化与 QMI8658 传感器通信所需的环境和参数
- 初始化 I2C 通信,确保与传感器的连接通道建立
- 初始化传感器,检查传感器是否正常连接
- 配置传感器的加速度计和陀螺仪参数,以满足特定的应用需求
- 启用传感器,使其开始采集数据
- read_sensor_data:在一个持续的循环中读取 QMI8658 传感器的数据并进行处理和输出
- 在循环中不断检查传感器数据是否准备好
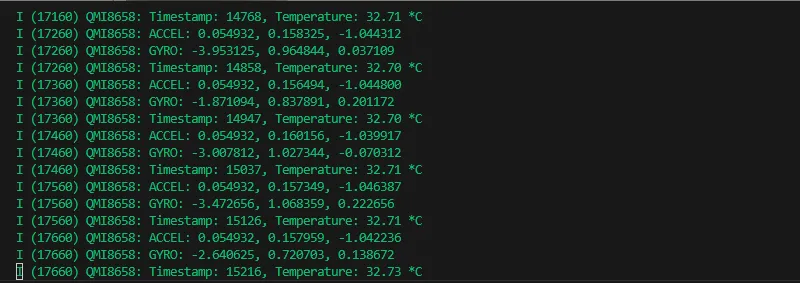
- 当数据准备好时,读取加速度计、陀螺仪、时间戳和温度数据,并进行日志输出
- 处理数据读取失败的情况,记录错误日志以便进行故障排查
- 通过延迟控制循环的执行速度,避免过度占用系统资源
运行效果
- 此示例不会点亮屏幕
- 串口监视器打印传感器数据
05_LVGL_WITH_RAM
程序说明
- 本示例展示 LVGLdemo,通过开启双缓存、开启 DMA 加速防撕裂等方式运行 LVGL 的 demo,可流畅运行动态图文,帧率可达 200~300 帧
硬件连接
- 将开发板接入电脑
代码分析
- app_main:整个应用的初始化和启动流程
- 硬件初始化:配置和初始化与 LCD 显示和触摸输入(如果有)相关的硬件设备,如 GPIO 引脚、SPI 总线、I2C 总线、LCD 面板驱动和触摸控制器驱动等
- LVGL 初始化:初始化 LVGL 库,分配绘图缓冲区,注册显示驱动和触摸输入设备驱动(如果有),安装定时器,并创建互斥锁和启动 LVGL 任务
- 示例展示:最后展示 LVGL 的示例,如小部件示例等
- example_lvgl_port_task:LVGL 的任务函数,负责处理 LVGL 的定时更新和任务延迟控制,确保 LVGL 界面的流畅运行
- 定时更新:在任务循环中,通过获取互斥锁,调用 lv_timer_handler 处理 LVGL 的定时器事件,以更新界面状态
- 延迟控制:根据定时器处理结果确定任务的延迟时间,避免过度占用 CPU 资源,同时确保及时响应 LVGL 的事件
运行效果
 |  |
|---|