Arduino 开发
本章节包含以下部分,请按需阅读:
Arduino 入门教程
初次接触 Arduino ESP32 开发,想要快速上手?我们为您准备了一套通用的 入门教程。
- 第0节 认识 ESP32
- 第1节 安装和配置 Arduino IDE
- 第2节 Arduino 基础知识
- 第3节 数字输出/输入
- 第4节 模拟输入
- 第5节 脉冲宽度调制 (PWM)
- 第6节 串行通信 (UART)
- 第7节 I2C 通信
- 第8节 SPI 通信
- 第9节 Wi-Fi 基础用法
- 第10节 网页服务器
- 第11节 蓝牙 (Bluetooth)
- 第12节 LVGL 图形界面开发
- 第13节 综合项目
请注意:该教程使用 ESP32-S3-Zero 作为教学示例,所有硬件代码均基于其引脚布局。在动手实践前,建议您对照手中的开发板引脚图,确认引脚配置无误。
配置开发环境
1. 安装和配置 Arduino IDE
请参考 安装和配置 Arduino IDE 教程 下载安装 Arduino IDE 并添加 ESP32 支持。
2. 安装库
要运行示例,需要安装对应的库。示例代码使用 GFX Library for Arduino 库驱动 ST7789 显示屏
,并使用 Arduino_DriveBus 库驱动 CST816 触摸芯片。
可从 此链接 的 Arduino 目录中,下载 ESP32-C6-Touch-LCD-1.83 开发板的示例程序包。包内的 Arduino\libraries 目录已包含本教程所需的全部库文件。
| 库或文件名称 | 说明 | 版本 | 安装方式 |
|---|---|---|---|
| GFX Library for Arduino | ST7789 显示驱动图形库 | v1.6.0 | 通过库管理器或手动安装 |
| SensorLib | PCF85063、QMI8658 传感器驱动库 | v0.3.1 | 通过库管理器或手动安装 |
| XPowersLib | AXP2101驱动库 | v0.3.0 | 通过库管理器或手动安装 |
| lvgl | lvgl显示显示框架 | v8.4.0 | 通过库管理器或手动安装 |
| Arduino_DriveBus | I2C,触摸驱动库 | v1.0.1 | 手动安装 |
LVGL 及其驱动库的版本之间存在较强的依赖关系。例如,为 LVGL v8 编写的驱动可能不兼容 LVGL v9。为确保示例能够稳定复现,推荐使用上表列出的特定版本。混合使用不同版本的库可能导致编译失败或运行时异常。
安装步骤:
-
下载 示例程序包。
-
将其
Arduino\libraries目录下的所有文件夹(Arduino_DriveBus、GFX_Library_for_Arduino 等)复制到 Arduino 的库文件夹中。信息Arduino 库文件夹的路径通常是:
c:\Users\<用户名>\Documents\Arduino\libraries。也可以在 Arduino IDE 中通过 文件 > 首选项,查看“项目文件夹位置”来定位。库文件夹就是此路径下的
libraries文件夹。 -
其他安装方式请参考:Arduino 库管理教程。
3. 其他提示
ESP32-C6-Touch-LCD-1.83 需要选择及配置开发板。
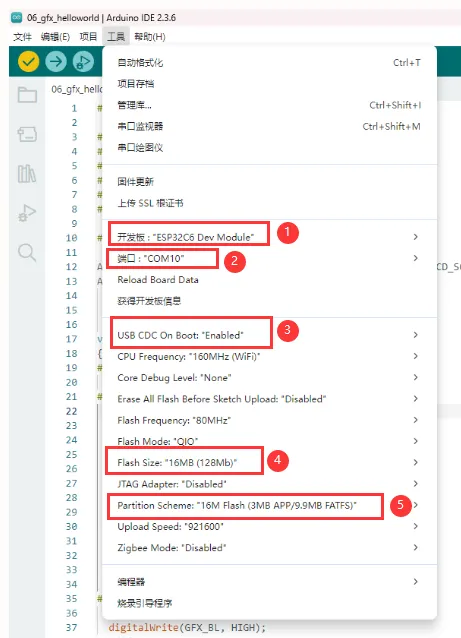
- ESP32-C6-Touch-LCD-1.83 需要选择ESP32C6 Dev Module。
- 选择USB端口
- ESP32-C6-Touch-LCD-1.83 使用 ESP32-C6 原生 USB 接口,而非 UART 转 USB。对于串口通信:
-
printf()函数可直接使用; -
若要使用
Serial.println()函数,需要额外配置:在 IDE 工具菜单中启用"USB CDC On Boot"选项,或在代码中声明 HWCDC 对象处理 USB 串口通信。
-
- 选择16MB flash
- 选择合适大小的分区表
示例程序
Arduino 示例程序位于 示例程序包 的 Arduino/examples 目录中。
| 示例程序 | 基础例程说明 | 依赖库 |
|---|---|---|
| 01_sd_test | 展示基本的挂载TF卡过程,读写文件测试 | |
| 02_audio_out | 播放MP3音频 | |
| 03_axp2101_example | 电源管理芯片AXP2101测试 | XPowersLib |
| 04_qmi8658_example | IMU qmi8658测试 | SensorLib |
| 05_pcf85063_example | RTC实时时钟PCF85063测试 | SensorLib |
| 06_gfx_helloworld | 一个简单的 ST7789 屏幕驱动示例 | GFX_Library_for_Arduino |
| 07_LVGL_Arduino | lvgl8.4示例程序 | SArduino_DriveBus,GFX_Library_for_Arduino ,lvgl |
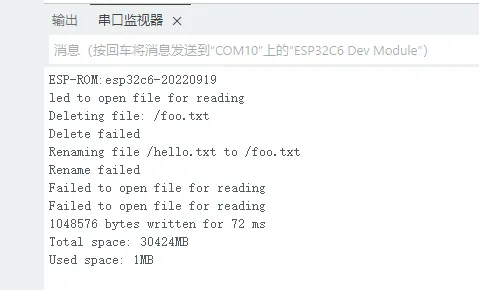
01_sd_test
本示例展示如何使用SPI挂载TF卡,并测试读写文件
代码
01_sd_test.ino
#include "FS.h"
#include "SD.h"
#include "SPI.h"
#define REASSIGN_PINS
int sck = 1;
int miso = 16;
int mosi = 2;
int cs = 17;
void listDir(fs::FS &fs, const char *dirname, uint8_t levels) {
Serial.printf("Listing directory: %s\n", dirname);
File root = fs.open(dirname);
if (!root) {
Serial.println("Failed to open directory");
return;
}
if (!root.isDirectory()) {
Serial.println("Not a directory");
return;
}
File file = root.openNextFile();
while (file) {
if (file.isDirectory()) {
Serial.print(" DIR : ");
Serial.println(file.name());
if (levels) {
listDir(fs, file.path(), levels - 1);
}
} else {
Serial.print(" FILE: ");
Serial.print(file.name());
Serial.print(" SIZE: ");
Serial.println(file.size());
}
file = root.openNextFile();
}
}
void createDir(fs::FS &fs, const char *path) {
Serial.printf("Creating Dir: %s\n", path);
if (fs.mkdir(path)) {
Serial.println("Dir created");
} else {
Serial.println("mkdir failed");
}
}
void removeDir(fs::FS &fs, const char *path) {
Serial.printf("Removing Dir: %s\n", path);
if (fs.rmdir(path)) {
Serial.println("Dir removed");
} else {
Serial.println("rmdir failed");
}
}
void readFile(fs::FS &fs, const char *path) {
Serial.printf("Reading file: %s\n", path);
File file = fs.open(path);
if (!file) {
Serial.println("Failed to open file for reading");
return;
}
Serial.print("Read from file: ");
while (file.available()) {
Serial.write(file.read());
}
file.close();
}
void writeFile(fs::FS &fs, const char *path, const char *message) {
Serial.printf("Writing file: %s\n", path);
File file = fs.open(path, FILE_WRITE);
if (!file) {
Serial.println("Failed to open file for writing");
return;
}
if (file.print(message)) {
Serial.println("File written");
} else {
Serial.println("Write failed");
}
file.close();
}
void appendFile(fs::FS &fs, const char *path, const char *message) {
Serial.printf("Appending to file: %s\n", path);
File file = fs.open(path, FILE_APPEND);
if (!file) {
Serial.println("Failed to open file for appending");
return;
}
if (file.print(message)) {
Serial.println("Message appended");
} else {
Serial.println("Append failed");
}
file.close();
}
void renameFile(fs::FS &fs, const char *path1, const char *path2) {
Serial.printf("Renaming file %s to %s\n", path1, path2);
if (fs.rename(path1, path2)) {
Serial.println("File renamed");
} else {
Serial.println("Rename failed");
}
}
void deleteFile(fs::FS &fs, const char *path) {
Serial.printf("Deleting file: %s\n", path);
if (fs.remove(path)) {
Serial.println("File deleted");
} else {
Serial.println("Delete failed");
}
}
void testFileIO(fs::FS &fs, const char *path) {
File file = fs.open(path);
static uint8_t buf[512];
size_t len = 0;
uint32_t start = millis();
uint32_t end = start;
if (file) {
len = file.size();
size_t flen = len;
start = millis();
while (len) {
size_t toRead = len;
if (toRead > 512) {
toRead = 512;
}
file.read(buf, toRead);
len -= toRead;
}
end = millis() - start;
Serial.printf("%u bytes read for %lu ms\n", flen, end);
file.close();
} else {
Serial.println("Failed to open file for reading");
}
file = fs.open(path, FILE_WRITE);
if (!file) {
Serial.println("Failed to open file for writing");
return;
}
size_t i;
start = millis();
for (i = 0; i < 2048; i++) {
file.write(buf, 512);
}
end = millis() - start;
Serial.printf("%u bytes written for %lu ms\n", 2048 * 512, end);
file.close();
}
void setup() {
Serial.begin(115200);
#ifdef REASSIGN_PINS
SPI.begin(sck, miso, mosi, cs);
if (!SD.begin(cs)) {
#else
if (!SD.begin()) {
#endif
Serial.println("Card Mount Failed");
return;
}
uint8_t cardType = SD.cardType();
if (cardType == CARD_NONE) {
Serial.println("No SD card attached");
return;
}
Serial.print("SD Card Type: ");
if (cardType == CARD_MMC) {
Serial.println("MMC");
} else if (cardType == CARD_SD) {
Serial.println("SDSC");
} else if (cardType == CARD_SDHC) {
Serial.println("SDHC");
} else {
Serial.println("UNKNOWN");
}
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
Serial.printf("SD Card Size: %lluMB\n", cardSize);
listDir(SD, "/", 0);
createDir(SD, "/mydir");
listDir(SD, "/", 0);
removeDir(SD, "/mydir");
listDir(SD, "/", 2);
writeFile(SD, "/hello.txt", "Hello ");
appendFile(SD, "/hello.txt", "World!\n");
readFile(SD, "/hello.txt");
deleteFile(SD, "/foo.txt");
renameFile(SD, "/hello.txt", "/foo.txt");
readFile(SD, "/foo.txt");
testFileIO(SD, "/test.txt");
Serial.printf("Total space: %lluMB\n", SD.totalBytes() / (1024 * 1024));
Serial.printf("Used space: %lluMB\n", SD.usedBytes() / (1024 * 1024));
}
void loop() {}
代码解释
-
初始化 SPI及挂载TF卡:
#ifdef REASSIGN_PINSSPI.begin(sck, miso, mosi, cs);if (!SD.begin(cs)) {#elseif (!SD.begin()) {#endifSerial.println("Card Mount Failed");return;}uint8_t cardType = SD.cardType();if (cardType == CARD_NONE) {Serial.println("No SD card attached");return;}Serial.print("SD Card Type: ");if (cardType == CARD_MMC) {Serial.println("MMC");} else if (cardType == CARD_SD) {Serial.println("SDSC");} else if (cardType == CARD_SDHC) {Serial.println("SDHC");} else {Serial.println("UNKNOWN");}uint64_t cardSize = SD.cardSize() / (1024 * 1024);Serial.printf("SD Card Size: %lluMB\n", cardSize); -
测试文件读写 :
listDir(SD, "/", 0);createDir(SD, "/mydir");listDir(SD, "/", 0);removeDir(SD, "/mydir");listDir(SD, "/", 2);writeFile(SD, "/hello.txt", "Hello ");appendFile(SD, "/hello.txt", "World!\n");readFile(SD, "/hello.txt");deleteFile(SD, "/foo.txt");renameFile(SD, "/hello.txt", "/foo.txt");readFile(SD, "/foo.txt");testFileIO(SD, "/test.txt");Serial.printf("Total space: %lluMB\n", SD.totalBytes() / (1024 * 1024));Serial.printf("Used space: %lluMB\n", SD.usedBytes() / (1024 * 1024));
02_audio_out
本示例演示如何使用 I2S播放音频,此例程屏幕无任何显示,烧录后会自动播放音频
代码
02_audio_out.ino
#include <Arduino.h>
#include "ESP_I2S.h"
#include "esp_check.h"
#include "Wire.h"
#include "es8311.h"
#include "music.h"
#define I2C_SDA 7
#define I2C_SCL 8
#define I2S_NUM I2S_NUM_0
#define I2S_MCK_PIN 19
#define I2S_BCK_PIN 20
#define I2S_LRCK_PIN 22
#define I2S_DOUT_PIN 23
#define I2S_DIN_PIN 21
#define PA_CTRL_PIN 0
#define EXAMPLE_SAMPLE_RATE (24000)
#define EXAMPLE_MCLK_MULTIPLE (256) // If not using 24-bit data width, 256 should be enough
#define EXAMPLE_MCLK_FREQ_HZ (EXAMPLE_SAMPLE_RATE * EXAMPLE_MCLK_MULTIPLE)
#define EXAMPLE_VOICE_VOLUME (50)
I2SClass i2s;
void setupI2S() {
i2s.setPins(I2S_BCK_PIN, I2S_LRCK_PIN, I2S_DOUT_PIN, I2S_DIN_PIN, I2S_MCK_PIN);
// Initialize the I2S bus in standard mode
if (!i2s.begin(I2S_MODE_STD, EXAMPLE_SAMPLE_RATE, I2S_DATA_BIT_WIDTH_16BIT, I2S_SLOT_MODE_MONO, I2S_STD_SLOT_LEFT)) {
Serial.println("Failed to initialize I2S bus!");
return;
}
}
static esp_err_t es8311_codec_init(void) {
es8311_handle_t es_handle = es8311_create(I2C_NUM_0, ES8311_ADDRRES_0);
ESP_RETURN_ON_FALSE(es_handle, ESP_FAIL, TAG, "es8311 create failed");
const es8311_clock_config_t es_clk = {
.mclk_inverted = false,
.sclk_inverted = false,
.mclk_from_mclk_pin = true,
.mclk_frequency = EXAMPLE_MCLK_FREQ_HZ,
.sample_frequency = EXAMPLE_SAMPLE_RATE
};
ESP_ERROR_CHECK(es8311_init(es_handle, &es_clk, ES8311_RESOLUTION_16, ES8311_RESOLUTION_16));
ESP_RETURN_ON_ERROR(es8311_voice_volume_set(es_handle, EXAMPLE_VOICE_VOLUME, NULL), TAG, "set es8311 volume failed");
ESP_RETURN_ON_ERROR(es8311_microphone_config(es_handle, false), TAG, "set es8311 microphone failed");
return ESP_OK;
}
void setup() {
Serial.begin(115200);
Wire.begin(I2C_SDA, I2C_SCL);
es8311_codec_init();
setupI2S();
Serial.println("I2S Initialized");
pinMode(PA_CTRL_PIN, OUTPUT);
digitalWrite(PA_CTRL_PIN, HIGH);
}
void loop() {
i2s.write((uint8_t *)audio_data, AUDIO_SAMPLES * 2);
}
代码解释
-
初始化I2C,I2S等外设,并配置ES8311解码器 :
Serial.begin(115200);Wire.begin(I2C_SDA, I2C_SCL);es8311_codec_init();setupI2S();Serial.println("I2S Initialized");pinMode(PA_CTRL_PIN, OUTPUT);digitalWrite(PA_CTRL_PIN, HIGH);
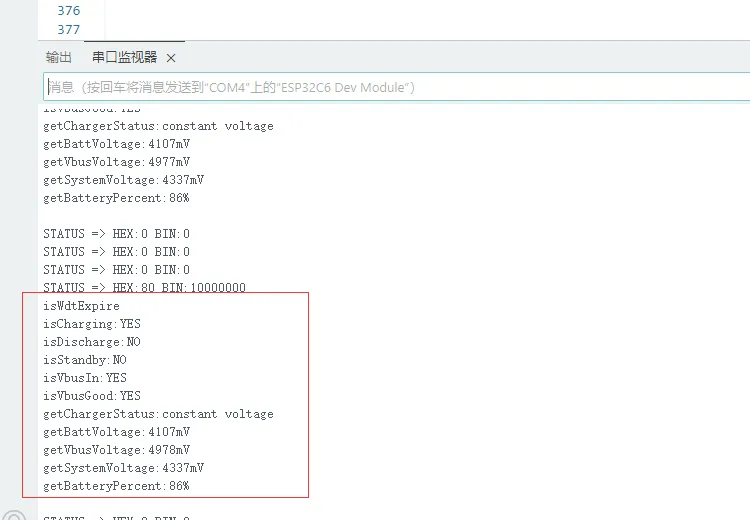
03_axp2101_example
本示例展示如何使用电源管理芯片,并打印出电池相关信息
代码
03_axp2101_example.ino
#define XPOWERS_CHIP_AXP2101
#include <Wire.h>
#include <Arduino.h>
#include "XPowersLib.h"
#ifndef CONFIG_PMU_SDA
#define CONFIG_PMU_SDA 7
#endif
#ifndef CONFIG_PMU_SCL
#define CONFIG_PMU_SCL 8
#endif
#ifndef CONFIG_PMU_IRQ
#define CONFIG_PMU_IRQ -1
#endif
bool pmu_flag = 0;
XPowersPMU power;
const uint8_t i2c_sda = CONFIG_PMU_SDA;
const uint8_t i2c_scl = CONFIG_PMU_SCL;
const uint8_t pmu_irq_pin = CONFIG_PMU_IRQ;
void setFlag(void)
{
pmu_flag = true;
}
void setup()
{
Serial.begin(115200);
delay(1000);
bool result = power.begin(Wire, AXP2101_SLAVE_ADDRESS, i2c_sda, i2c_scl);
if (result == false) {
Serial.println("power is not online..."); while (1)delay(50);
}
Serial.printf("getID:0x%x\n", power.getChipID());
// Set the minimum common working voltage of the PMU VBUS input,
// below this value will turn off the PMU
power.setVbusVoltageLimit(XPOWERS_AXP2101_VBUS_VOL_LIM_4V36);
// Set the maximum current of the PMU VBUS input,
// higher than this value will turn off the PMU
power.setVbusCurrentLimit(XPOWERS_AXP2101_VBUS_CUR_LIM_1500MA);
// Get the VSYS shutdown voltage
uint16_t vol = power.getSysPowerDownVoltage();
Serial.printf("-> getSysPowerDownVoltage:%u\n", vol);
// Set VSY off voltage as 2600mV , Adjustment range 2600mV ~ 3300mV
power.setSysPowerDownVoltage(2600);
vol = power.getSysPowerDownVoltage();
Serial.printf("-> getSysPowerDownVoltage:%u\n", vol);
// DC1 IMAX=2A
// 1500~3400mV,100mV/step,20steps
power.setDC1Voltage(3300);
Serial.printf("DC1 : %s Voltage:%u mV \n", power.isEnableDC1() ? "+" : "-", power.getDC1Voltage());
// DC2 IMAX=2A
// 500~1200mV 10mV/step,71steps
// 1220~1540mV 20mV/step,17steps
power.setDC2Voltage(1000);
Serial.printf("DC2 : %s Voltage:%u mV \n", power.isEnableDC2() ? "+" : "-", power.getDC2Voltage());
// DC3 IMAX = 2A
// 500~1200mV,10mV/step,71steps
// 1220~1540mV,20mV/step,17steps
// 1600~3400mV,100mV/step,19steps
power.setDC3Voltage(3300);
Serial.printf("DC3 : %s Voltage:%u mV \n", power.isEnableDC3() ? "+" : "-", power.getDC3Voltage());
// DCDC4 IMAX=1.5A
// 500~1200mV,10mV/step,71steps
// 1220~1840mV,20mV/step,32steps
power.setDC4Voltage(1000);
Serial.printf("DC4 : %s Voltage:%u mV \n", power.isEnableDC4() ? "+" : "-", power.getDC4Voltage());
// DC5 IMAX=2A
// 1200mV
// 1400~3700mV,100mV/step,24steps
power.setDC5Voltage(3300);
Serial.printf("DC5 : %s Voltage:%u mV \n", power.isEnableDC5() ? "+" : "-", power.getDC5Voltage());
//ALDO1 IMAX=300mA
//500~3500mV, 100mV/step,31steps
power.setALDO1Voltage(3300);
//ALDO2 IMAX=300mA
//500~3500mV, 100mV/step,31steps
power.setALDO2Voltage(3300);
//ALDO3 IMAX=300mA
//500~3500mV, 100mV/step,31steps
power.setALDO3Voltage(3300);
//ALDO4 IMAX=300mA
//500~3500mV, 100mV/step,31steps
power.setALDO4Voltage(3300);
//BLDO1 IMAX=300mA
//500~3500mV, 100mV/step,31steps
power.setBLDO1Voltage(3300);
//BLDO2 IMAX=300mA
//500~3500mV, 100mV/step,31steps
power.setBLDO2Voltage(3300);
//CPUSLDO IMAX=30mA
//500~1400mV,50mV/step,19steps
power.setCPUSLDOVoltage(1000);
//DLDO1 IMAX=300mA
//500~3400mV, 100mV/step,29steps
power.setDLDO1Voltage(3300);
//DLDO2 IMAX=300mA
//500~1400mV, 50mV/step,2steps
power.setDLDO2Voltage(3300);
// power.enableDC1();
power.disableDC2();
power.disableDC3();
power.disableDC4();
power.disableDC5();
power.enableALDO1();
power.disableALDO2();
power.disableALDO3();
power.disableALDO4();
power.disableBLDO1();
power.disableBLDO2();
power.disableCPUSLDO();
power.disableDLDO1();
power.disableDLDO2();
Serial.println("DCDC=======================================================================");
Serial.printf("DC1 : %s Voltage:%u mV \n", power.isEnableDC1() ? "+" : "-", power.getDC1Voltage());
Serial.printf("DC2 : %s Voltage:%u mV \n", power.isEnableDC2() ? "+" : "-", power.getDC2Voltage());
Serial.printf("DC3 : %s Voltage:%u mV \n", power.isEnableDC3() ? "+" : "-", power.getDC3Voltage());
Serial.printf("DC4 : %s Voltage:%u mV \n", power.isEnableDC4() ? "+" : "-", power.getDC4Voltage());
Serial.printf("DC5 : %s Voltage:%u mV \n", power.isEnableDC5() ? "+" : "-", power.getDC5Voltage());
Serial.println("ALDO=======================================================================");
Serial.printf("ALDO1: %s Voltage:%u mV\n", power.isEnableALDO1() ? "+" : "-", power.getALDO1Voltage());
Serial.printf("ALDO2: %s Voltage:%u mV\n", power.isEnableALDO2() ? "+" : "-", power.getALDO2Voltage());
Serial.printf("ALDO3: %s Voltage:%u mV\n", power.isEnableALDO3() ? "+" : "-", power.getALDO3Voltage());
Serial.printf("ALDO4: %s Voltage:%u mV\n", power.isEnableALDO4() ? "+" : "-", power.getALDO4Voltage());
Serial.println("BLDO=======================================================================");
Serial.printf("BLDO1: %s Voltage:%u mV\n", power.isEnableBLDO1() ? "+" : "-", power.getBLDO1Voltage());
Serial.printf("BLDO2: %s Voltage:%u mV\n", power.isEnableBLDO2() ? "+" : "-", power.getBLDO2Voltage());
Serial.println("CPUSLDO====================================================================");
Serial.printf("CPUSLDO: %s Voltage:%u mV\n", power.isEnableCPUSLDO() ? "+" : "-", power.getCPUSLDOVoltage());
Serial.println("DLDO=======================================================================");
Serial.printf("DLDO1: %s Voltage:%u mV\n", power.isEnableDLDO1() ? "+" : "-", power.getDLDO1Voltage());
Serial.printf("DLDO2: %s Voltage:%u mV\n", power.isEnableDLDO2() ? "+" : "-", power.getDLDO2Voltage());
Serial.println("===========================================================================");
// Set the time of pressing the button to turn off
power.setPowerKeyPressOffTime(XPOWERS_POWEROFF_4S);
uint8_t opt = power.getPowerKeyPressOffTime();
Serial.print("PowerKeyPressOffTime:");
switch (opt) {
case XPOWERS_POWEROFF_4S: Serial.println("4 Second");
break;
case XPOWERS_POWEROFF_6S: Serial.println("6 Second");
break;
case XPOWERS_POWEROFF_8S: Serial.println("8 Second");
break;
case XPOWERS_POWEROFF_10S: Serial.println("10 Second");
break;
default:
break;
}
// Set the button power-on press time
power.setPowerKeyPressOnTime(XPOWERS_POWERON_128MS);
opt = power.getPowerKeyPressOnTime();
Serial.print("PowerKeyPressOnTime:");
switch (opt) {
case XPOWERS_POWERON_128MS: Serial.println("128 Ms");
break;
case XPOWERS_POWERON_512MS: Serial.println("512 Ms");
break;
case XPOWERS_POWERON_1S: Serial.println("1 Second");
break;
case XPOWERS_POWERON_2S: Serial.println("2 Second");
break;
default:
break;
}
Serial.println("===========================================================================");
bool en;
// DCDC 120%(130%) high voltage turn off PMIC function
en = power.getDCHighVoltagePowerDownEn();
Serial.print("getDCHighVoltagePowerDownEn:");
Serial.println(en ? "ENABLE" : "DISABLE");
// DCDC1 85% low voltage turn off PMIC function
en = power.getDC1LowVoltagePowerDownEn();
Serial.print("getDC1LowVoltagePowerDownEn:");
Serial.println(en ? "ENABLE" : "DISABLE");
// DCDC2 85% low voltage turn off PMIC function
en = power.getDC2LowVoltagePowerDownEn();
Serial.print("getDC2LowVoltagePowerDownEn:");
Serial.println(en ? "ENABLE" : "DISABLE");
// DCDC3 85% low voltage turn off PMIC function
en = power.getDC3LowVoltagePowerDownEn();
Serial.print("getDC3LowVoltagePowerDownEn:");
Serial.println(en ? "ENABLE" : "DISABLE");
// DCDC4 85% low voltage turn off PMIC function
en = power.getDC4LowVoltagePowerDownEn();
Serial.print("getDC4LowVoltagePowerDownEn:");
Serial.println(en ? "ENABLE" : "DISABLE");
// DCDC5 85% low voltage turn off PMIC function
en = power.getDC5LowVoltagePowerDownEn();
Serial.print("getDC5LowVoltagePowerDownEn:");
Serial.println(en ? "ENABLE" : "DISABLE");
// power.setDCHighVoltagePowerDown(true);
// power.setDC1LowVoltagePowerDown(true);
// power.setDC2LowVoltagePowerDown(true);
// power.setDC3LowVoltagePowerDown(true);
// power.setDC4LowVoltagePowerDown(true);
// power.setDC5LowVoltagePowerDown(true);
// It is necessary to disable the detection function of the TS pin on the board
// without the battery temperature detection function, otherwise it will cause abnormal charging
power.disableTSPinMeasure();
// power.enableTemperatureMeasure();
// Enable internal ADC detection
power.enableBattDetection();
power.enableVbusVoltageMeasure();
power.enableBattVoltageMeasure();
power.enableSystemVoltageMeasure();
/*
The default setting is CHGLED is automatically controlled by the PMU.
- XPOWERS_CHG_LED_OFF,
- XPOWERS_CHG_LED_BLINK_1HZ,
- XPOWERS_CHG_LED_BLINK_4HZ,
- XPOWERS_CHG_LED_ON,
- XPOWERS_CHG_LED_CTRL_CHG,
* */
power.setChargingLedMode(XPOWERS_CHG_LED_OFF);
// Force add pull-up
pinMode(pmu_irq_pin, INPUT_PULLUP);
attachInterrupt(pmu_irq_pin, setFlag, FALLING);
// Disable all interrupts
power.disableIRQ(XPOWERS_AXP2101_ALL_IRQ);
// Clear all interrupt flags
power.clearIrqStatus();
// Enable the required interrupt function
power.enableIRQ(
XPOWERS_AXP2101_BAT_INSERT_IRQ | XPOWERS_AXP2101_BAT_REMOVE_IRQ | //BATTERY
XPOWERS_AXP2101_VBUS_INSERT_IRQ | XPOWERS_AXP2101_VBUS_REMOVE_IRQ | //VBUS
XPOWERS_AXP2101_PKEY_SHORT_IRQ | XPOWERS_AXP2101_PKEY_LONG_IRQ | //POWER KEY
XPOWERS_AXP2101_BAT_CHG_DONE_IRQ | XPOWERS_AXP2101_BAT_CHG_START_IRQ //CHARGE
// XPOWERS_AXP2101_PKEY_NEGATIVE_IRQ | XPOWERS_AXP2101_PKEY_POSITIVE_IRQ | //POWER KEY
);
// Set the precharge charging current
power.setPrechargeCurr(XPOWERS_AXP2101_PRECHARGE_50MA);
// Set constant current charge current limit
power.setChargerConstantCurr(XPOWERS_AXP2101_CHG_CUR_200MA);
// Set stop charging termination current
power.setChargerTerminationCurr(XPOWERS_AXP2101_CHG_ITERM_25MA);
// Set charge cut-off voltage
power.setChargeTargetVoltage(XPOWERS_AXP2101_CHG_VOL_4V1);
// Set the watchdog trigger event type
power.setWatchdogConfig(XPOWERS_AXP2101_WDT_IRQ_TO_PIN);
// Set watchdog timeout
power.setWatchdogTimeout(XPOWERS_AXP2101_WDT_TIMEOUT_4S);
// Enable watchdog to trigger interrupt event
power.enableWatchdog();
// power.disableWatchdog();
// Enable Button Battery charge
power.enableButtonBatteryCharge();
// Set Button Battery charge voltage
power.setButtonBatteryChargeVoltage(3300);
}
void printPMU()
{
Serial.print("isCharging:"); Serial.println(power.isCharging() ? "YES" : "NO");
Serial.print("isDischarge:"); Serial.println(power.isDischarge() ? "YES" : "NO");
Serial.print("isStandby:"); Serial.println(power.isStandby() ? "YES" : "NO");
Serial.print("isVbusIn:"); Serial.println(power.isVbusIn() ? "YES" : "NO");
Serial.print("isVbusGood:"); Serial.println(power.isVbusGood() ? "YES" : "NO");
Serial.print("getChargerStatus:");
uint8_t charge_status = power.getChargerStatus();
if (charge_status == XPOWERS_AXP2101_CHG_TRI_STATE) {
Serial.println("tri_charge");
} else if (charge_status == XPOWERS_AXP2101_CHG_PRE_STATE) {
Serial.println("pre_charge");
} else if (charge_status == XPOWERS_AXP2101_CHG_CC_STATE) {
Serial.println("constant charge");
} else if (charge_status == XPOWERS_AXP2101_CHG_CV_STATE) {
Serial.println("constant voltage");
} else if (charge_status == XPOWERS_AXP2101_CHG_DONE_STATE) {
Serial.println("charge done");
} else if (charge_status == XPOWERS_AXP2101_CHG_STOP_STATE) {
Serial.println("not charge");
}
Serial.print("getBattVoltage:"); Serial.print(power.getBattVoltage()); Serial.println("mV");
Serial.print("getVbusVoltage:"); Serial.print(power.getVbusVoltage()); Serial.println("mV");
Serial.print("getSystemVoltage:"); Serial.print(power.getSystemVoltage()); Serial.println("mV");
// The battery percentage may be inaccurate at first use, the PMU will automatically
// learn the battery curve and will automatically calibrate the battery percentage
// after a charge and discharge cycle
if (power.isBatteryConnect()) {
Serial.print("getBatteryPercent:"); Serial.print(power.getBatteryPercent()); Serial.println("%");
}
Serial.println();
}
void enterPmuSleep(void)
{
// Set the wake-up source to PWRKEY
power.wakeupControl(XPOWERS_AXP2101_WAKEUP_IRQ_PIN_TO_LOW, true);
// Set sleep flag
power.enableSleep();
power.disableDC2();
power.disableDC3();
power.disableDC4();
power.disableDC5();
power.disableALDO1();
power.disableALDO2();
power.disableALDO3();
power.disableALDO4();
power.disableBLDO1();
power.disableBLDO2();
power.disableCPUSLDO();
power.disableDLDO1();
power.disableDLDO2();
// Finally, turn off the power of the control chip
power.disableDC1();
}
void loop()
{
if (pmu_flag) {
pmu_flag = false;
// Get PMU Interrupt Status Register
uint32_t status = power.getIrqStatus();
Serial.print("STATUS => HEX:");
Serial.print(status, HEX);
Serial.print(" BIN:");
Serial.println(status, BIN);
if (power.isDropWarningLevel2Irq()) {
Serial.println("isDropWarningLevel2");
}
if (power.isDropWarningLevel1Irq()) {
Serial.println("isDropWarningLevel1");
}
if (power.isGaugeWdtTimeoutIrq()) {
Serial.println("isWdtTimeout");
}
if (power.isBatChargerOverTemperatureIrq()) {
Serial.println("isBatChargeOverTemperature");
}
if (power.isBatWorkOverTemperatureIrq()) {
Serial.println("isBatWorkOverTemperature");
}
if (power.isBatWorkUnderTemperatureIrq()) {
Serial.println("isBatWorkUnderTemperature");
}
if (power.isVbusInsertIrq()) {
Serial.println("isVbusInsert");
}
if (power.isVbusRemoveIrq()) {
Serial.println("isVbusRemove");
}
if (power.isBatInsertIrq()) {
Serial.println("isBatInsert");
}
if (power.isBatRemoveIrq()) {
Serial.println("isBatRemove");
}
if (power.isPekeyShortPressIrq()) {
Serial.println("isPekeyShortPress");
// enterPmuSleep();
Serial.print("Read pmu data buffer .");
uint8_t data[4] = {0};
power.readDataBuffer(data, XPOWERS_AXP2101_DATA_BUFFER_SIZE);
for (int i = 0; i < 4; ++i) {
Serial.print(data[i]);
Serial.print(",");
}
Serial.println();
}
if (power.isPekeyLongPressIrq()) {
Serial.println("isPekeyLongPress");
Serial.println("write pmu data buffer .");
uint8_t data[4] = {1, 2, 3, 4};
power.writeDataBuffer(data, XPOWERS_AXP2101_DATA_BUFFER_SIZE);
}
if (power.isPekeyNegativeIrq()) {
Serial.println("isPekeyNegative");
}
if (power.isPekeyPositiveIrq()) {
Serial.println("isPekeyPositive");
}
if (power.isWdtExpireIrq()) {
Serial.println("isWdtExpire");
printPMU();
}
if (power.isLdoOverCurrentIrq()) {
Serial.println("isLdoOverCurrentIrq");
}
if (power.isBatfetOverCurrentIrq()) {
Serial.println("isBatfetOverCurrentIrq");
}
if (power.isBatChargeDoneIrq()) {
Serial.println("isBatChargeDone");
}
if (power.isBatChargeStartIrq()) {
Serial.println("isBatChargeStart");
}
if (power.isBatDieOverTemperatureIrq()) {
Serial.println("isBatDieOverTemperature");
}
if (power.isChargeOverTimeoutIrq()) {
Serial.println("isChargeOverTimeout");
}
if (power.isBatOverVoltageIrq()) {
Serial.println("isBatOverVoltage");
}
// Clear PMU Interrupt Status Register
power.clearIrqStatus();
}
delay(10);
}
代码解释
-
初始化AXP2101 :
bool result = power.begin(Wire, AXP2101_SLAVE_ADDRESS, i2c_sda, i2c_scl);
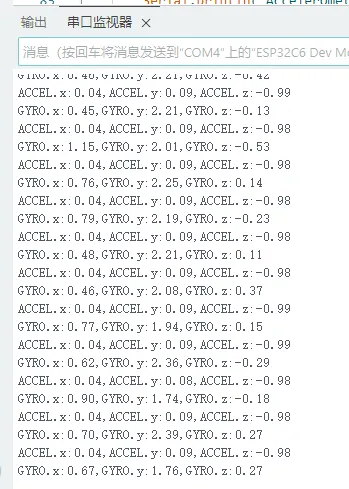
04_qmi8658_example
本示例打印了imu qmi8658的运行结果
代码
04_qmi8658_example.ino
#include <Arduino.h>
#include <Wire.h>
#include <SPI.h>
#include "SensorQMI8658.hpp"
// #define USE_I2C //Using the I2C interface
#ifndef SENSOR_SDA
#define SENSOR_SDA 7
#endif
#ifndef SENSOR_SCL
#define SENSOR_SCL 8
#endif
#ifndef IMU_IRQ
#define IMU_IRQ 10
#endif
SensorQMI8658 qmi;
IMUdata acc;
IMUdata gyr;
void setup()
{
Serial.begin(115200);
while (!Serial);
bool ret = false;
ret = qmi.begin(Wire, QMI8658_L_SLAVE_ADDRESS, SENSOR_SDA, SENSOR_SCL);
if (!ret) {
Serial.println("Failed to find QMI8658 - check your wiring!");
while (1) {
delay(1000);
}
}
/* Get chip id*/
Serial.print("Device ID:");
Serial.println(qmi.getChipID(), HEX);
if (qmi.selfTestAccel()) {
Serial.println("Accelerometer self-test successful");
} else {
Serial.println("Accelerometer self-test failed!");
}
if (qmi.selfTestGyro()) {
Serial.println("Gyroscope self-test successful");
} else {
Serial.println("Gyroscope self-test failed!");
}
qmi.configAccelerometer(
/*
* ACC_RANGE_2G
* ACC_RANGE_4G
* ACC_RANGE_8G
* ACC_RANGE_16G
* */
SensorQMI8658::ACC_RANGE_4G,
/*
* ACC_ODR_1000H
* ACC_ODR_500Hz
* ACC_ODR_250Hz
* ACC_ODR_125Hz
* ACC_ODR_62_5Hz
* ACC_ODR_31_25Hz
* ACC_ODR_LOWPOWER_128Hz
* ACC_ODR_LOWPOWER_21Hz
* ACC_ODR_LOWPOWER_11Hz
* ACC_ODR_LOWPOWER_3H
* */
SensorQMI8658::ACC_ODR_1000Hz,
/*
* LPF_MODE_0 //2.66% of ODR
* LPF_MODE_1 //3.63% of ODR
* LPF_MODE_2 //5.39% of ODR
* LPF_MODE_3 //13.37% of ODR
* LPF_OFF // OFF Low-Pass Fitter
* */
SensorQMI8658::LPF_MODE_0);
qmi.configGyroscope(
/*
* GYR_RANGE_16DPS
* GYR_RANGE_32DPS
* GYR_RANGE_64DPS
* GYR_RANGE_128DPS
* GYR_RANGE_256DPS
* GYR_RANGE_512DPS
* GYR_RANGE_1024DPS
* */
SensorQMI8658::GYR_RANGE_64DPS,
/*
* GYR_ODR_7174_4Hz
* GYR_ODR_3587_2Hz
* GYR_ODR_1793_6Hz
* GYR_ODR_896_8Hz
* GYR_ODR_448_4Hz
* GYR_ODR_224_2Hz
* GYR_ODR_112_1Hz
* GYR_ODR_56_05Hz
* GYR_ODR_28_025H
* */
SensorQMI8658::GYR_ODR_896_8Hz,
/*
* LPF_MODE_0 //2.66% of ODR
* LPF_MODE_1 //3.63% of ODR
* LPF_MODE_2 //5.39% of ODR
* LPF_MODE_3 //13.37% of ODR
* LPF_OFF // OFF Low-Pass Fitter
* */
SensorQMI8658::LPF_MODE_3);
/*
* If both the accelerometer and gyroscope sensors are turned on at the same time,
* the output frequency will be based on the gyroscope output frequency.
* The example configuration is 896.8HZ output frequency,
* so the acceleration output frequency is also limited to 896.8HZ
* */
qmi.enableGyroscope();
qmi.enableAccelerometer();
// Print register configuration information
qmi.dumpCtrlRegister();
#if IMU_IRQ > 0
// If you want to enable interrupts, then turn on the interrupt enable
qmi.enableINT(SensorQMI8658::INTERRUPT_PIN_1, true);
qmi.enableINT(SensorQMI8658::INTERRUPT_PIN_2, false);
#endif
Serial.println("Read data now...");
}
void loop()
{
// When the interrupt pin is passed in through setPin,
// the GPIO will be read to see if the data is ready.
if (qmi.getDataReady()) {
// Serial.print("Timestamp:");
// Serial.print(qmi.getTimestamp());
if (qmi.getAccelerometer(acc.x, acc.y, acc.z)) {
// Print to serial plotter
Serial.print("ACCEL.x:"); Serial.print(acc.x); Serial.print(",");
Serial.print("ACCEL.y:"); Serial.print(acc.y); Serial.print(",");
Serial.print("ACCEL.z:"); Serial.print(acc.z); Serial.println();
/*
m2/s to mg
Serial.print(" ACCEL.x:"); Serial.print(acc.x * 1000); Serial.println(" mg");
Serial.print(",ACCEL.y:"); Serial.print(acc.y * 1000); Serial.println(" mg");
Serial.print(",ACCEL.z:"); Serial.print(acc.z * 1000); Serial.println(" mg");
*/
}
if (qmi.getGyroscope(gyr.x, gyr.y, gyr.z)) {
// Print to serial plotter
Serial.print("GYRO.x:"); Serial.print(gyr.x); Serial.print(",");
Serial.print("GYRO.y:"); Serial.print(gyr.y); Serial.print(",");
Serial.print("GYRO.z:"); Serial.print(gyr.z); Serial.println();
// Serial.print(" GYRO.x:"); Serial.print(gyr.x); Serial.println(" degrees/sec");
// Serial.print(",GYRO.y:"); Serial.print(gyr.y); Serial.println(" degrees/sec");
// Serial.print(",GYRO.z:"); Serial.print(gyr.z); Serial.println(" degrees/sec");
}
// Serial.print("Temperature:");
// Serial.print(qmi.getTemperature_C());
// Serial.println(" degrees C");
}
delay(100);
}
代码解释
-
初始化qmi8658 :
ret = qmi.begin(Wire, QMI8658_L_SLAVE_ADDRESS, SENSOR_SDA, SENSOR_SCL);
05_pcf85063_example
本示例打印出RTC实时时钟pcf85063的值
代码
05_pcf85063_example.ino
#include <Wire.h>
#include <SPI.h>
#include <Arduino.h>
#include <SensorPCF85063.hpp>
#ifndef SENSOR_SDA
#define SENSOR_SDA 7
#endif
#ifndef SENSOR_SCL
#define SENSOR_SCL 8
#endif
#ifndef SENSOR_IRQ
#define SENSOR_IRQ 15
#endif
SensorPCF85063 rtc;
uint32_t interval = 0;
uint32_t loopCount = 0;
void printInt(int val)
{
if (val < 10) {
Serial.print("0");
}
Serial.print(val);
}
void setup()
{
Serial.begin(115200);
// Wait for the serial port to be ready
while (!Serial);
// Try to initialize the RTC module using I2C with specified SDA and SCL pins
if (!rtc.begin(Wire, SENSOR_SDA, SENSOR_SCL)) {
Serial.println("Failed to find PCF85063 - check your wiring!");
// Enter an infinite loop to halt the program
while (1) {
delay(1000);
}
}
uint16_t year = 2023;
uint8_t month = 9;
uint8_t day = 7;
uint8_t hour = 11;
uint8_t minute = 24;
uint8_t second = 30;
// Set the defined date and time on the RTC
rtc.setDateTime(year, month, day, hour, minute, second);
if (!rtc.isClockIntegrityGuaranteed()) {
Serial.println("[ERROR]:Clock integrity is not guaranteed; oscillator has stopped or has been interrupted");
}
}
void loop()
{
// Check if one second has passed since the last update
if (millis() > interval) {
// Update the interval to the current time
interval = millis() + 1000;
// Retrieve the current date and time from the RTC
RTC_DateTime datetime = rtc.getDateTime();
Serial.print("[RTC ]:");
Serial.print(" Year :"); printInt(datetime.getYear());
Serial.print(" Month:"); printInt(datetime.getMonth());
Serial.print(" Day :"); printInt(datetime.getDay());
Serial.print(" Hour:"); printInt(datetime.getHour());
Serial.print(" Minute:"); printInt(datetime.getMinute());
Serial.print(" Sec :"); printInt(datetime.getSecond());
Serial.println();
// Convert the RTC date and time to Unix time
struct tm info = datetime.toUnixTime();
Serial.print("[UNIX]:");
Serial.print(" Year :"); printInt(info.tm_year + 1900); // tm_year starts counting from 1900
Serial.print(" Month:"); printInt(info.tm_mon + 1); // tm_mon range is 0 - 11, 0 means January
Serial.print(" Day :"); printInt(info.tm_mday);
Serial.print(" Hour:"); printInt(info.tm_hour);
Serial.print(" Minute:"); printInt(info.tm_min);
Serial.print(" Sec :"); printInt(info.tm_sec);
Serial.println();
// Set a new Unix time at the 10th loop iteration
if (loopCount == 10) {
Serial.print("Set Unix Time:");
Serial.println();
Serial.println();
struct tm utc_tm;
utc_tm.tm_year = 2025 - 1900; // tm_year starts counting from 1900
utc_tm.tm_mon = 0; // tm_mon range is 0 - 11, 0 means January
utc_tm.tm_mday = 23;
utc_tm.tm_hour = 7;
utc_tm.tm_min = 1;
utc_tm.tm_sec = 28;
rtc.setDateTime(utc_tm);
}
// Set a UTC time with a time zone offset of 8 hours at the 20th loop iteration
if (loopCount == 20) {
Serial.print("Set UTC time to time zone offset 8 hours:");
Serial.println();
Serial.println();
struct tm utc_tm;
utc_tm.tm_year = 2025 - 1900; // tm_year starts counting from 1900
utc_tm.tm_mon = 0; // tm_mon range is 0 - 11, 0 means January
utc_tm.tm_mday = 23;
utc_tm.tm_hour = 7;
utc_tm.tm_min = 1;
utc_tm.tm_sec = 28;
rtc.convertUtcToTimezone(utc_tm, 8 * 3600);
rtc.setDateTime(utc_tm);
}
if (loopCount > 30) {
char buf[64];
struct tm timeinfo;
// Get the time C library structure
rtc.getDateTime(&timeinfo);
// Format the output using the strftime function
// For more formats, please refer to :
// https://man7.org/linux/man-pages/man3/strftime.3.html
size_t written = strftime(buf, 64, "%A, %B %d %Y %H:%M:%S", &timeinfo);
if (written != 0) {
Serial.println(buf);
}
written = strftime(buf, 64, "%b %d %Y %H:%M:%S", &timeinfo);
if (written != 0) {
Serial.println(buf);
}
written = strftime(buf, 64, "%A, %d. %B %Y %I:%M%p", &timeinfo);
if (written != 0) {
Serial.println(buf);
}
}
++loopCount;
}
}
代码解释
-
初始化PCF85063 :
if (!rtc.begin(Wire, SENSOR_SDA, SENSOR_SCL)) {Serial.println("Failed to find PCF85063 - check your wiring!");// Enter an infinite loop to halt the programwhile (1) {delay(1000);}} -
设置时间 :
uint16_t year = 2023;uint8_t month = 9;uint8_t day = 7;uint8_t hour = 11;uint8_t minute = 24;uint8_t second = 30;// Set the defined date and time on the RTCrtc.setDateTime(year, month, day, hour, minute, second);
06_gfx_helloworld
本示例驱动屏幕,并在屏幕上不断打印helloworld。
代码
06_gfx_helloworld.ino
#include <Arduino_GFX_Library.h>
#define LCD_SCK 1
#define LCD_DIN 2
#define LCD_CS 5
#define LCD_DC 3
#define LCD_RST 4
#define LCD_BL 6
#define GFX_BL LCD_BL
Arduino_DataBus *bus = new Arduino_HWSPI(LCD_DC, LCD_CS, LCD_SCK, LCD_DIN);
Arduino_GFX *gfx = new Arduino_ST7789(
bus, LCD_RST, 0 /* rotation */, true /* IPS */,
240 /* width */, 284 /* height */);
void setup(void)
{
#ifdef DEV_DEVICE_INIT
DEV_DEVICE_INIT();
#endif
Serial.begin(115200);
// Serial.setDebugOutput(true);
// while(!Serial);
Serial.println("Arduino_GFX Hello World example");
// Init Display
if (!gfx->begin())
{
Serial.println("gfx->begin() failed!");
}
gfx->fillScreen(RGB565_BLACK);
#ifdef GFX_BL
pinMode(GFX_BL, OUTPUT);
digitalWrite(GFX_BL, HIGH);
#endif
while(1) {
gfx->fillScreen(RGB565_BLUE);
delay(1000);
gfx->fillScreen(RGB565_RED);
delay(1000);
gfx->fillScreen(RGB565_GREEN);
delay(1000);
}
gfx->setCursor(10, 10);
gfx->setTextColor(RGB565_RED);
gfx->println("Hello World!");
delay(5000); // 5 seconds
}
void loop()
{
gfx->setCursor(random(gfx->width()), random(gfx->height()));
gfx->setTextColor(random(0xffff), random(0xffff));
gfx->setTextSize(random(6) /* x scale */, random(6) /* y scale */, random(2) /* pixel_margin */);
gfx->println("Hello World!");
delay(1000); // 1 second
}
代码解释
-
初始化SPI总线以及屏幕 :
Arduino_DataBus *bus = new Arduino_HWSPI(LCD_DC, LCD_CS, LCD_SCK, LCD_DIN);Arduino_GFX *gfx = new Arduino_ST7789(bus, LCD_RST, 0 /* rotation */, true /* IPS */,240 /* width */, 284 /* height */); -
填充Hello World :
gfx->setCursor(random(gfx->width()), random(gfx->height()));gfx->setTextColor(random(0xffff), random(0xffff));gfx->setTextSize(random(6) /* x scale */, random(6) /* y scale */, random(2) /* pixel_margin */);gfx->println("Hello World!");
07_LVGL_Arduino
本示例使用Arduino_GFX_Library驱动ST7789屏幕,同时移植LVGL,以及触摸驱动

代码
07_LVGL_Arduino.ino
#include <lvgl.h>
#include <Arduino_GFX_Library.h>
#include "Arduino_DriveBus_Library.h"
#include "lv_conf.h"
#include <demos/lv_demos.h>
#include "HWCDC.h"
HWCDC USBSerial;
#define LCD_SCK 1
#define LCD_DIN 2
#define LCD_CS 5
#define LCD_DC 3
#define LCD_RST 4
#define LCD_BL 6
#define GFX_BL LCD_BL
#define LCD_WIDTH 240
#define LCD_HEIGHT 284
#define IIC_SDA 7
#define IIC_SCL 8
#define TP_INT 11
Arduino_DataBus *bus = new Arduino_HWSPI(LCD_DC, LCD_CS, LCD_SCK, LCD_DIN);
Arduino_GFX *gfx = new Arduino_ST7789(
bus, LCD_RST, 0 /* rotation */, true /* IPS */,
LCD_WIDTH /* width */, LCD_HEIGHT /* height */);
std::shared_ptr<Arduino_IIC_DriveBus> IIC_Bus =
std::make_shared<Arduino_HWIIC>(IIC_SDA, IIC_SCL, &Wire);
void Arduino_IIC_Touch_Interrupt(void);
std::unique_ptr<Arduino_IIC> CST816T(new Arduino_CST816x(IIC_Bus, CST816T_DEVICE_ADDRESS,
-1, TP_INT, Arduino_IIC_Touch_Interrupt));
void Arduino_IIC_Touch_Interrupt(void) {
CST816T->IIC_Interrupt_Flag = true;
}
#define EXAMPLE_LVGL_TICK_PERIOD_MS 2
uint32_t screenWidth;
uint32_t screenHeight;
static lv_disp_draw_buf_t draw_buf;
// static lv_color_t buf[screenWidth * screenHeight / 10];
#if LV_USE_LOG != 0
/* Serial debugging */
void my_print(const char *buf) {
Serial.printf(buf);
Serial.flush();
}
#endif
/* Display flushing */
void my_disp_flush(lv_disp_drv_t *disp, const lv_area_t *area, lv_color_t *color_p) {
uint32_t w = (area->x2 - area->x1 + 1);
uint32_t h = (area->y2 - area->y1 + 1);
#if (LV_COLOR_16_SWAP != 0)
gfx->draw16bitBeRGBBitmap(area->x1, area->y1, (uint16_t *)&color_p->full, w, h);
#else
gfx->draw16bitRGBBitmap(area->x1, area->y1, (uint16_t *)&color_p->full, w, h);
#endif
lv_disp_flush_ready(disp);
}
void example_increase_lvgl_tick(void *arg) {
/* Tell LVGL how many milliseconds has elapsed */
lv_tick_inc(EXAMPLE_LVGL_TICK_PERIOD_MS);
}
static uint8_t count = 0;
void example_increase_reboot(void *arg) {
count++;
if (count == 30) {
esp_restart();
}
}
/*Read the touchpad*/
void my_touchpad_read(lv_indev_drv_t *indev_driver, lv_indev_data_t *data) {
int32_t touchX = CST816T->IIC_Read_Device_Value(CST816T->Arduino_IIC_Touch::Value_Information::TOUCH_COORDINATE_X);
int32_t touchY = CST816T->IIC_Read_Device_Value(CST816T->Arduino_IIC_Touch::Value_Information::TOUCH_COORDINATE_Y);
if (CST816T->IIC_Interrupt_Flag == true) {
CST816T->IIC_Interrupt_Flag = false;
data->state = LV_INDEV_STATE_PR;
/* Set the coordinates with some debounce */
if (touchX >= 0 && touchY >= 0) {
data->point.x = touchX;
data->point.y = touchY;
USBSerial.printf("Data x: %d, Data y: %d\n", touchX, touchY);
}
} else {
data->state = LV_INDEV_STATE_REL;
}
}
void setup() {
USBSerial.begin(115200); /* prepare for possible serial debug */
while (CST816T->begin() == false) {
USBSerial.println("CST816T initialization fail");
delay(2000);
}
USBSerial.println("CST816T initialization successfully");
CST816T->IIC_Write_Device_State(CST816T->Arduino_IIC_Touch::Device::TOUCH_DEVICE_INTERRUPT_MODE,
CST816T->Arduino_IIC_Touch::Device_Mode::TOUCH_DEVICE_INTERRUPT_PERIODIC);
gfx->begin();
pinMode(LCD_BL, OUTPUT);
digitalWrite(LCD_BL, HIGH);
screenWidth = gfx->width();
screenHeight = gfx->height();
lv_init();
lv_color_t *buf1 = (lv_color_t *)heap_caps_malloc(screenWidth * screenHeight / 4 * sizeof(lv_color_t), MALLOC_CAP_DMA);
lv_color_t *buf2 = (lv_color_t *)heap_caps_malloc(screenWidth * screenHeight / 4 * sizeof(lv_color_t), MALLOC_CAP_DMA);
String LVGL_Arduino = "Hello Arduino! ";
LVGL_Arduino += String('V') + lv_version_major() + "." + lv_version_minor() + "." + lv_version_patch();
USBSerial.println(LVGL_Arduino);
USBSerial.println("I am LVGL_Arduino");
#if LV_USE_LOG != 0
lv_log_register_print_cb(my_print); /* register print function for debugging */
#endif
lv_disp_draw_buf_init(&draw_buf, buf1, buf2, screenWidth * screenHeight / 4);
/*Initialize the display*/
static lv_disp_drv_t disp_drv;
lv_disp_drv_init(&disp_drv);
/*Change the following line to your display resolution*/
disp_drv.hor_res = screenWidth;
disp_drv.ver_res = screenHeight;
disp_drv.flush_cb = my_disp_flush;
disp_drv.draw_buf = &draw_buf;
lv_disp_drv_register(&disp_drv);
/*Initialize the (dummy) input device driver*/
static lv_indev_drv_t indev_drv;
lv_indev_drv_init(&indev_drv);
indev_drv.type = LV_INDEV_TYPE_POINTER;
indev_drv.read_cb = my_touchpad_read;
lv_indev_drv_register(&indev_drv);
lv_obj_t *label = lv_label_create(lv_scr_act());
lv_label_set_text(label, "Hello Ardino and LVGL!");
lv_obj_align(label, LV_ALIGN_CENTER, 0, 0);
const esp_timer_create_args_t lvgl_tick_timer_args = {
.callback = &example_increase_lvgl_tick,
.name = "lvgl_tick"
};
const esp_timer_create_args_t reboot_timer_args = {
.callback = &example_increase_reboot,
.name = "reboot"
};
esp_timer_handle_t lvgl_tick_timer = NULL;
esp_timer_create(&lvgl_tick_timer_args, &lvgl_tick_timer);
esp_timer_start_periodic(lvgl_tick_timer, EXAMPLE_LVGL_TICK_PERIOD_MS * 1000);
lv_demo_widgets();
// lv_demo_benchmark();
// lv_demo_keypad_encoder();
// lv_demo_music();
// lv_demo_stress();
// lv_obj_t *img_obj = lv_img_create(lv_scr_act());
// lv_img_set_src(img_obj, &img_test3); // Set the image source to img_test3
// lv_obj_align(img_obj, LV_ALIGN_CENTER, 0, 0);
// USBSerial.println("Setup done");
}
void loop() {
lv_timer_handler(); /* let the GUI do its work */
delay(5);
}
代码解释
-
初始化SPI总线以及屏幕 :
Arduino_DataBus *bus = new Arduino_HWSPI(LCD_DC, LCD_CS, LCD_SCK, LCD_DIN);Arduino_GFX *gfx = new Arduino_ST7789(bus, LCD_RST, 0 /* rotation */, true /* IPS */,LCD_WIDTH /* width */, LCD_HEIGHT /* height */); -
初始化触摸芯片CST816 :
std::unique_ptr<Arduino_IIC> CST816T(new Arduino_CST816x(IIC_Bus, CST816T_DEVICE_ADDRESS,-1, TP_INT, Arduino_IIC_Touch_Interrupt)); -
初始化LVGL,配置触摸驱动,并显示加载LVGL示例程序 :
screenWidth = gfx->width();screenHeight = gfx->height();lv_init();lv_color_t *buf1 = (lv_color_t *)heap_caps_malloc(screenWidth * screenHeight / 4 * sizeof(lv_color_t), MALLOC_CAP_DMA);lv_color_t *buf2 = (lv_color_t *)heap_caps_malloc(screenWidth * screenHeight / 4 * sizeof(lv_color_t), MALLOC_CAP_DMA);String LVGL_Arduino = "Hello Arduino! ";LVGL_Arduino += String('V') + lv_version_major() + "." + lv_version_minor() + "." + lv_version_patch();USBSerial.println(LVGL_Arduino);USBSerial.println("I am LVGL_Arduino");#if LV_USE_LOG != 0lv_log_register_print_cb(my_print); /* register print function for debugging */#endiflv_disp_draw_buf_init(&draw_buf, buf1, buf2, screenWidth * screenHeight / 4);/*Initialize the display*/static lv_disp_drv_t disp_drv;lv_disp_drv_init(&disp_drv);/*Change the following line to your display resolution*/disp_drv.hor_res = screenWidth;disp_drv.ver_res = screenHeight;disp_drv.flush_cb = my_disp_flush;disp_drv.draw_buf = &draw_buf;lv_disp_drv_register(&disp_drv);/*Initialize the (dummy) input device driver*/static lv_indev_drv_t indev_drv;lv_indev_drv_init(&indev_drv);indev_drv.type = LV_INDEV_TYPE_POINTER;indev_drv.read_cb = my_touchpad_read;lv_indev_drv_register(&indev_drv);lv_obj_t *label = lv_label_create(lv_scr_act());lv_label_set_text(label, "Hello Ardino and LVGL!");lv_obj_align(label, LV_ALIGN_CENTER, 0, 0);const esp_timer_create_args_t lvgl_tick_timer_args = {.callback = &example_increase_lvgl_tick,.name = "lvgl_tick"};const esp_timer_create_args_t reboot_timer_args = {.callback = &example_increase_reboot,.name = "reboot"};esp_timer_handle_t lvgl_tick_timer = NULL;esp_timer_create(&lvgl_tick_timer_args, &lvgl_tick_timer);esp_timer_start_periodic(lvgl_tick_timer, EXAMPLE_LVGL_TICK_PERIOD_MS * 1000);lv_demo_widgets();